Signalverlauf beim Ausführen von ExecuteCmd
Beispiel
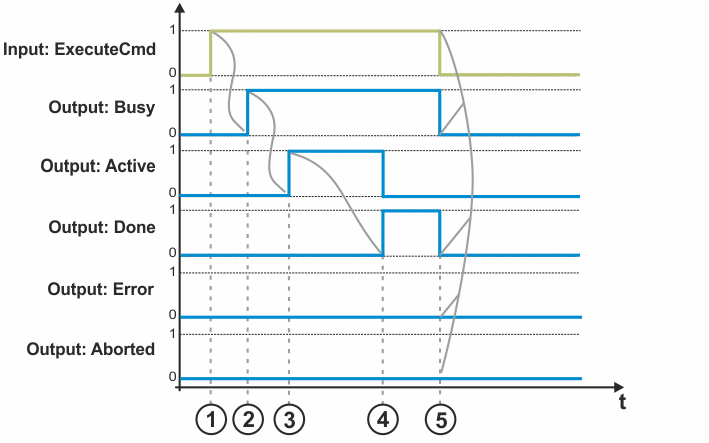
Der Signalverlauf wird für folgenden Fall dargestellt:
- Eine Anweisung wurde über ExecuteCmd übertragen und erfolgreich ausgeführt.
Signalverlauf – ExecuteCmd erfolgreich
Pos. | Beschreibung |
|---|---|
1 | Der Funktionsbaustein wird an den Roboter übertragen (= Aufforderung, Anweisung auszuführen). |
2 | Die Anweisung wird übertragen. |
3 | Die Anweisung wird aktuell ausgeführt. |
4 | Die Anweisung wurde erfolgreich beendet. Weder ist ein Fehler aufgetreten noch wurde die Anweisung abgebrochen, z. B. durch KRC_Abort. Bei einem Fehler würde statt dem Done-Signal das Error-Signal und bei einem Abbruch statt dem Done-Signal das Aborted-Signal gesetzt. |
5 | Wenn der ExecuteCmd-Eingang zurückgesetzt wird, werden auch die Ausgänge zurückgesetzt. |
Variationen
- ExecuteCmd wird zurückgesetzt, bevor Done gesetzt wird. In diesem Fall wird die Anweisung zwar ausgeführt, jedoch das Done-Signal nicht gesetzt. D. h., es wird nicht zurückgemeldet, dass die Anweisung ausgeführt wurde.
- ExecuteCmd wird zurückgesetzt, bevor Error oder Aborted gesetzt wird. In diesem Fall wird die Anweisung abgebrochen, jedoch das Error- oder das Aborted-Signal nicht gesetzt. D. h., es wird nicht zurückgemeldet, dass die Anweisung abgebrochen wurde.
- ExecuteCmd wird zurückgesetzt, bevor Active gesetzt wird. In diesem Fall wird der Funktionsbaustein aus dem Anweisungspuffer des Roboters gelöscht.
- ExecuteCmd wird zurückgesetzt, bevor Busy gesetzt wird. In diesem Fall wird der Funktionsbaustein nicht an den Roboter übertragen und die Anweisung folglich nicht ausgeführt.