Time Compensation
Voraussetzung für die hochgenaue Umrechnung von Positionen in Zeiten und umgekehrt ist eine exakte Totzeitkompensation der Achsen. In Ausgaberichtung kann die Totzeitkompensation über Drive > Tab Time Compensation aktiviert und konfiguriert werden.
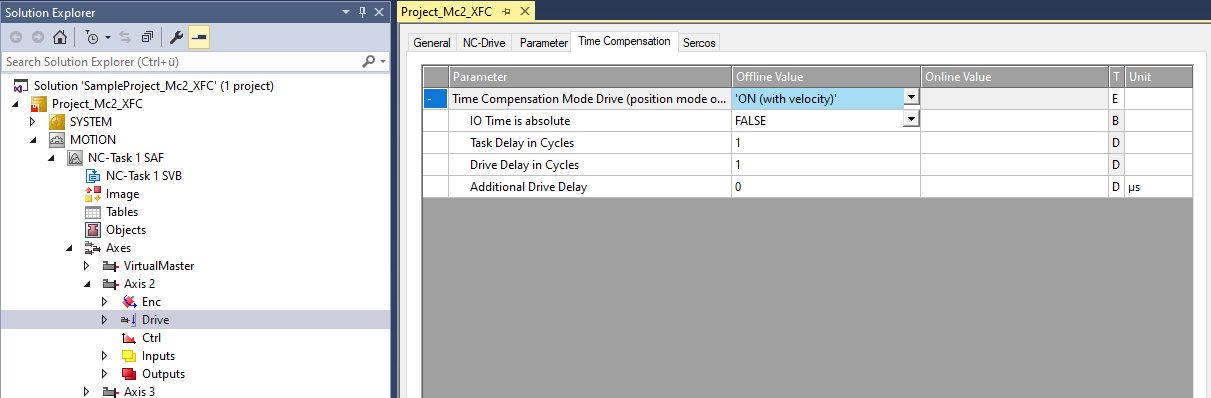
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Time Compensation Mode Drive (position mode only) | Aktivierung/Deaktivierung der Totzeitkompensation des Achs-Drives inkl. Auswahl des Modes:
| enum |
|
IO Time is absolute | Standard Muss auf | bool |
|
Task Delay in Cycles | Verzögerung durch die NC-SAF-Zykluszeit. Default 1 | double |
|
Drive Delay in Cycles | Zusätzliche Verzögerungen um ganze I/O-Zyklen. Diese Zeit ist keine feste Größe, sondern ändert sich mit der Zykluszeit. | double |
|
Additional Drive Delay | Fester Zeitwert in μs, der durch die verwendete Hardware verursacht wird. | double | µs |
Weitere Details zur Totzeitkompensation sind in der Dokumentation TF5065 TwinCAT 3 | PLC Motion Control XFC/XFC NCI zu finden.