Online
Eigenschaft | Beschreibung |
|---|---|
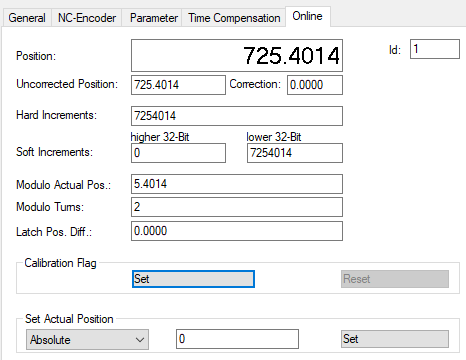
Position | Istposition des Encoders |
Id | Automatisch zugewiesene Encoder-ID |
Uncorrected Position | Istposition ohne Korrekturen, wie z. B. Positionskorrektur oder Positionsfilterung |
Correction | Positionskorrektur |
Hard Increments | Inkrementeller Zählwert von der Encoder-Hardware |
Soft Increments | Ausgewerteter inkrementeller Zählwert der NC |
Modulo Actual Pos | Modulo-Istposition (berechnet mit dem parametrierten Modulo-Faktor) |
Modulo Turns | Ganzzahlige Modulo-Umdrehungen (berechnet aus der Ist-Position) |
Latch Pos. Diff. | Positionsdifferenz zwischen der Referenznocke und dem Latch-Ereignis, die bei einer Referenzfahrt (Homing) ermittelt wird. |
Calibration Flag | Wenn ein absolutes Encodersystem konfiguriert ist, ist dieses von Beginn an kalibriert. Ein inkrementelles Encodersystem ist erst nach einer Referenzfahrt (Homing) kalibriert. Der Kalibrierungszustand kann über den Set- und Reset-Button manuell geändert werden. |
Set Actual Position | Die Ist-Position kann hier manuell eingestellt werden. Im Modus „Absolute“ wir die Position direkt wie eingegeben eingestellt. Im Modus „Relative“ wird die Position um diesen Betrag verschoben. |