Time Compensation
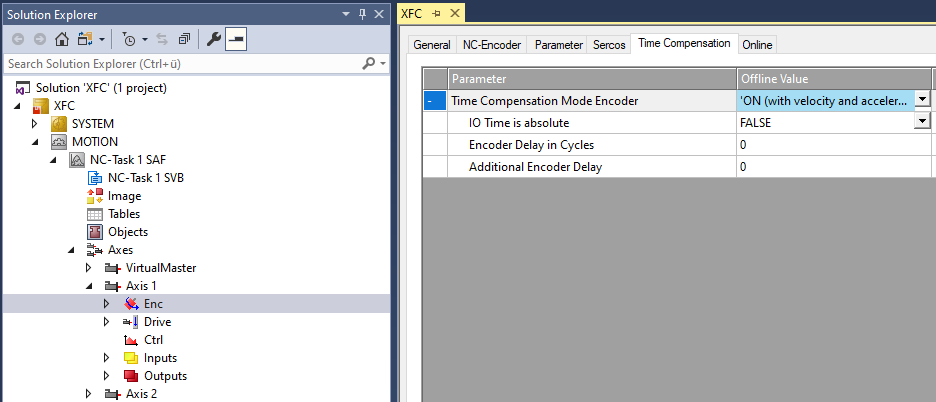
Voraussetzung für die hochgenaue Umrechnung von Positionen in Zeiten und umgekehrt ist eine exakte Totzeitkompensation der Achsen. Für die Datenerfassung kann dies über den Tab Time Compensation des Achs-Encoders (z. B. Axis 1 > Enc) aktiviert und konfiguriert werden.
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Time Compensation Mode Encoder | Aktivierung/Deaktivierung der Totzeitkompensation des Achs-Encoders inkl. Auswahl des Modes:
| enum |
|
IO Time is absolute | Standard Muss auf | bool |
|
Encoder Delay in Cycles | Zusätzliche Verzögerungen um ganze I/O-Zyklen. Diese Zeit ist keine feste Größe, sondern ändert sich mit der Zykluszeit. | double |
|
Additional Encoder Delay | Fester Zeitwert in μs, der durch die verwendete Hardware verursacht wird. | double | µs |
Weitere Details zur Totzeitkompensation sind in der Dokumentation TF5065 TwinCAT 3 | PLC Motion Control XFC/XFC NC I zu finden.