Regelalgorithmus
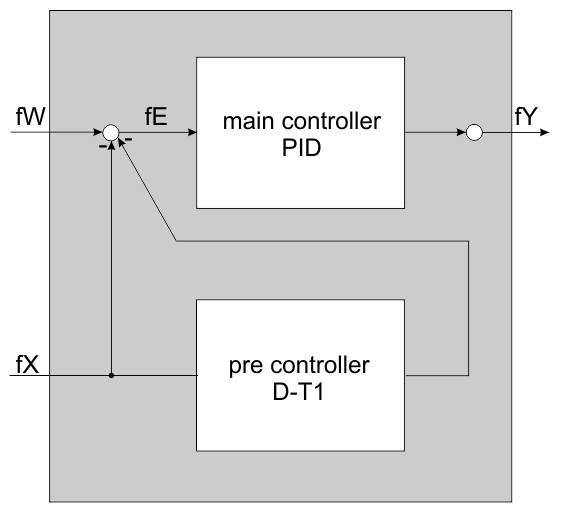
Der TwinCAT Temperature Controller setzt im Kern auf einem Standard-PID Regler auf. Dieser Reglerkern unterstützt auch Anti-Reset-Windup-Maßnahmen zur Begrenzung des I-Anteils, wenn die Stellgröße in die Begrenzung geht. Da der Regler durch das Einstellverfahren von Chien, Hrones und Reswick auf Störgrößenminimierung ausgelegt wurde, kann es bei Sollwertänderungen zum Überschwingen kommen. Um dieses Überschwingen zu reduzieren, kann bei Sollwertänderungen ein Vorregler vorgeschaltet werden. Dieser Vorregler hat ein D-T1-Verhalten und verringert das Überschwingen des Gesamtreglers. Da der Vorregler durch den D-Anteil eine Aufrauhung der Stellgröße zur Folge hat, ist der Einsatz des Vorreglers abzuwägen. Der Vorregler wird abgeschaltet, wenn die Istgröße für eine gewisse Zeit in einem Band um den Sollwert eingelaufen ist. Das Abschalten des Vorreglers erfolgt gerampt über einen längeren Zeitraum. Zur Minimierung der Stellgrößenoszillation kann optional ein Filter hinter dem Hauptregler aufgeschaltet werden. Als Filter stehen P-T1 und Moving Average-Filter zur Verfügung.
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS-Bibliotheken |
|---|---|---|
TwinCAT 3.1.4016 | PC oder CX | Tc2_TempController |