FB_CTRL_PID_EXT_SPLITRANGE
Der Funktionsbaustein stellt ein erweitertes PID-Übertragungsglied im Wirkungsplan dar. Bei diesem Regler ist es möglich, dass bei aktiver Regelung zwischen zwei Parametersätzen umgeschaltet werden kann. Zusätzlich stehen die Funktionalitäten des Inner- und Outer-Windows sowie des Input- und Output-Deadbands zur Verfügung.
Beschreibung
Bei diesem Funktionsbaustein handelt es sich um eine Erweiterung des FB_CTRL_PID_EXT, so dass der Regler für eine Strecke mit zwei Stelleinrichtungen eingesetzt werden kann, dessen Übertragungsverhalten unterschiedlich ist. Ein typischer Anwendungsfall ist eine Strecke mit einem Stellglied zum Heizen und einem Stellglied zum Kühlen. Um eine optimale Regelung einer solchen Anordnung zu ermöglichen, kann zwischen zwei PID-Parametersätzen umgeschaltet werden. Die Parameter-Satzumschaltung erfolgt dabei so, dass sich auch während der Umschaltung eine stetige Stellgröße ergibt.
Der Umschaltalgorithmus berechnet eine lineare zeitabhängige Transition zwischen den beiden Parametersätzen. Mit dem Parameter nParameterChangeCycleTicks kann die Anzahl der Task-Zyklen vorgegeben werden, in denen stetig zwischen den Parametersätzen umgeschaltet wird.
Übertragungsfunktion
Die folgende Übertragungsfunktion lässt sich angeben, wenn die boolschen Eingänge bPInTheFeedbackPath und bDInTheFeedbackPath FALSE sind, anderenfalls beschreibt die Übertragungsfunktion nur einen Teil des Übertragungsverhaltens des Blocks:
Wirkungsplan
Der Standardwirkungsplan eines PID-Reglers in additiver Form ist um die beiden als "Schalter" wirkenden boolschen Eingänge bPInTheFeedbackPath und bDInTheFeedbackPath erweitert worden, so dass ein modifizierter Wirkungsplan aktiviert werden kann.
Der regelungstechnische Hintergrund ist der, dass bei Sollwertsprüngen durch den Differential-Anteil des Regelalgorithmus große Stellgröße entstehen, die die Stellelemente belasten und das Regelsystem zum Schwingen anregen können. Ein Regelalgorithmus, dessen Differential-Anteil nur auf der Regelgröße angewendet wird (bDInTheFeedbackPath := TRUE), vermeidet dieses Problem.
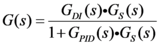
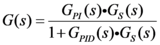
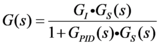
Mit den Eingängen bPInTheFeedbackPath und bDInTheFeedbackPath können die folgenden Übertragungsfunktionen des geschlossenen Regelkreises realisiert werden:
bPInTheFeedbackPath | bDInTheFeedbackPath | G(s) |
|---|---|---|
false | false |
|
true | false |
|
false | true |
|
true | true |
|
mit:
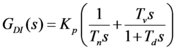
Die Standardeinstellung für die beiden Eingänge bPInTheFeedbackPath und bDInTheFeedbackPath ist FALSE. Der PID-Regler entspricht dann einem Standard PID-Regler in additiver Form.
Zusätzliche Funktionen
Abschaltung des I-Anteils in dem OuterWindow
Wenn die Regelabweichung größer als der Parameter fOuterWindow ist, wird die Integration der Regelabweichung angehalten. Hiermit kann verhindert werden, dass sich bei einer großen Regelabweichung ein sehr großer I-Anteil aufbaut, der eventuell zu einem zu starken Überschwingen führt. Wenn diese Funktion nicht gewünscht ist, kann sie mit fOuterWindow:= 0 deaktiviert werden.
Lineare Reduzierung des I-Anteils in dem InnerWindow
Mit dieser Funktion ist es möglich, den I-Anteil in dem mit dem Parameter fInnerWindow festgelegten Bereich linear zu Null zu führen. Wenn diese Funktion nicht gewünscht ist, kann sie mit fInnerWindow := 0 deaktiviert werden.
Totzone des Ausgangs
Wenn der Parameter fDeadBandOutput > 0 gesetzt wird, wird der Ausgang in dem Intervall [ -fDeadBandOutput ... fDeadBandOutput ] zu Null gesetzt.
Totzone des Eingangs
Wenn der Parameter fDeadBandInput > 0 gesetzt wird, wird der Ausgang konstant gehalten, solange sich die Regelabweichung in dem Intervall [ -fDeadBandInput ... fDeadBandInput ] befindet.
Sprungantwort
ARW
 Eingänge
Eingänge
VAR_INPUT
fSetpointValue : FLOAT;
fActualValue : FLOAT;
eParameterRecord : E_CTRL_PARAMETER_RECORD;
fManSyncValue : FLOAT;
bSync : BOOL;
eMode : E_CTRL_MODE;
bHold : BOOL;
END_VARName | Typ | Beschreibung |
|---|---|---|
fSetpointValue | FLOAT | Sollwert der Regelgröße |
fActualValue | FLOAT | Istwert der Regelgröße |
eParameterRecord | E_CTRL_PARAMETER_RECORD | Index des aktiven Parametersatzes |
fManSyncValue | FLOAT | Eingang, mit dem das PI-Glied gesetzt werden kann. |
bSync | BOOL | Mit einer steigenden Flanke an diesem Eingang wird das PI-Glied auf den Wert „fManSyncValue“ gesetzt. |
eMode | E_CTRL_MODE | Eingang, der die Betriebsart des Bausteins festlegt. |
bHold | BOOL | Ein TRUE an diesem Eingang hält den internen Zustand und somit auch den Ausgang unabhängig von der Regelabweichung konstant auf dem aktuellen Wert. |
 Ausgänge
Ausgänge
VAR_OUTPUT
fOutPos : FLOAT;
fOutNeg : FLOAT;
fOut : FLOAT;
bARWActive : BOOL := FALSE;
bParameterChangeActive : BOOL;
bError : BOOL;
eErrorId : E_CTRL_ERRORCODES;
END_VARName | Typ | Beschreibung |
|---|---|---|
fOutPos | FLOAT | Ausgang des PID-Glieds, wenn die Stellgröße positiv ist. Anderenfalls wird eine Null ausgegeben. |
fOutNeg | FLOAT | Ausgang des PID-Glieds, wenn die Stellgröße negativ ist. Anderenfalls wird eine Null ausgegeben. |
fOut | FLOAT | Ausgang des PID-Glieds |
bARWActive | BOOL | Ein TRUE an diesem Ausgang signalisiert, dass sich das PID-Glied in der Begrenzung befindet. |
bParameter | BOOL | Ein TRUE an diesem Ausgang signalisiert, dass ein Wechsel von einem zum anderen Parametersatz erfolgt. |
bError | BOOL | Wird TRUE, sobald ein Fehler eintritt. |
eErrorId | E_CTRL_ERRORCODES | Liefert bei einem gesetzten |
fCtrlDerivation |
| Ein TRUE an diesem Ausgang signalisiert, dass sich das PID-Glied in der Begrenzung befindet. |
 Ein-/ Ausgänge
Ein-/ Ausgänge
VAR_IN_OUT
stParams : ST_CTRL_PID_EXT_SPLITRANGE_PARAMS;
END_VAR Name | Typ | Beschreibung |
|---|---|---|
stParams | ST_CTRL_ | Parameterstruktur des PID-Glieds |
stParams besteht aus den folgenden Elementen:
TYPE
ST_CTRL_PID_EXT_SPLITRANGE_PARAMS :
STRUCT
tCtrlCycleTime : TIME := T#0ms;
tTaskCycleTime : TIME := T#0ms;
fKp_heating : FLOAT := 0;
tTn_heating : TIME := T#0ms;
tTv_heating : TIME := T#0ms;
tTd_heating : TIME := T#0ms;
fKp_cooling : FLOAT := 0;
tTn_cooling : TIME := T#0ms;
tTv_cooling : TIME := T#0ms;
tTd_cooling : TIME := T#0ms;
nParameterChangeCycleTicks : INT;
fDeadBandInput : REAL := 0.0;
fDeadBandOutput : REAL := 0.0;
fInnerWindow : REAL := 0.0;
fOuterWindow : REAL := 0.0;
fOutMaxLimit : FLOAT := 1E38;
fOutMinLimit : FLOAT := -1E38;
bPInTheFeedbackPath : BOOL;
bDInTheFeedbackPath : BOOL;
bARWOnIPartOnly : BOOL;
END_STRUCT
END_TYPEName | Typ | Beschreibung |
|---|---|---|
tCtrlCycleTime | TIME | Zykluszeit, mit der der Regelkreis bearbeitet wird. Diese muss größer oder gleich der TaskCycleTime sein. Der Funktionsbaustein berechnet mit dieser Eingangsgröße intern, ob die Zustands- und Ausgangsgrößen im aktuellen Zyklus aktualisiert werden müssen. |
tTaskCycleTime | TIME | Zykluszeit, mit der der Funktionsbaustein aufgerufen wird. Diese entspricht der Task-Zykluszeit der aufrufenden Task, wenn der Baustein in jedem Zyklus aufgerufen wird. |
Bereich eCTRL_PARAMETER_RECORD_HEATING: | ||
fKp_heating | FLOAT | Reglerverstärkung / Reglerbeiwert |
tTn_heating | TIME | Nachstellzeit: Wenn diese zu T#0s parametriert ist, wird der I-Anteil deaktiviert. |
tTv_heating | TIME | Vorhaltzeit: Wenn diese zu T#0s parametriert ist, wird der D-Anteil deaktiviert. |
tTd_heating | TIME | Dämpfungszeit |
Bereich eCTRL_PARAMETER_RECORD_COOLING: | ||
fKp_cooling | FLOAT | Reglerverstärkung / Reglerbeiwert |
tTn_cooling | TIME | Nachstellzeit: Wenn diese zu T#0s parametriert ist, wird der I-Anteil deaktiviert. |
tTv_cooling | TIME | Vorhaltzeit: Wenn diese zu T#0s parametriert ist, wird der D-Anteil deaktiviert. |
tTd_cooling | TIME | Dämpfungszeit |
nParameter | INT | Anzahl der Task-Zyklen, in denen von einem Parametersatz zum anderen gewechselt wird. |
fDeadBandInput | REAL | Siehe obige Beschreibung: Totzone des Eingangs |
fDeadBandOutput | REAL | Siehe obige Beschreibung: Totzone des Ausgangs |
fInnerWindow | REAL | Siehe obige Beschreibung: Lineare Reduzierung des I-Anteils in dem InnerWindow |
fOuterWindow | REAL | Siehe obige Beschreibung: Abschaltung des I-Anteils in dem OuterWindow |
fOutMaxLimit | FLOAT | Oberes Limit, an dem die Integration angehalten und der Ausgang begrenzt wird (ARW-Maßnahme). Das Erreichen dieses Limits wird durch ein TRUE an dem Ausgang |
fOutMinLimit | FLOAT | Unteres Limit, an dem die Integration angehalten und der Ausgang begrenzt wird (ARW-Maßnahme). Das Erreichen dieses Limits wird durch ein TRUE an dem Ausgang |
bPInTheFeed | BOOL | Eingang, mit dem die Eingangsgröße des P-Gliedes ausgewählt werden kann (siehe Wirkungsplan). |
bDInTheFeed | BOOL | Eingang, mit dem die Eingangsgröße des D-Gliedes ausgewählt werden kann (siehe Wirkungsplan). |
bARWOnIPart | BOOL | Wenn dieser Parameter FALSE ist (Standardeinstellung), wird die Integration des I-Anteil dann angehalten, wenn der gesamte Reglerausgang das obere oder untere Limit erreicht. Wenn dieser TRUE ist, wird die Integration dann angehalten, wenn der I-Anteil (der Integratorausgang) ein Limit erreicht. (Vergl. Wirkungsplan.) |