Speicherverwaltung
Die Condition Monitoring Bibliothek nutzt intern TcCOM Objekte welche von den installierten Treibern zur Verfügung gestellt werden. Die Instanzen werden dynamisch im TwinCAT AMS Routerspeicher angelegt.
Notwendigkeit dynamischer Speicherverwaltung
Alle Speicheranforderungen und Initialisierungen werden innerhalb der Initialisierungsphase durchgeführt. Da die Anzahl der Elemente der Eingangsdaten und der internen Strukturen von der Konfiguration der jeweiligen Bausteine abhängen, wird der Speicherplatz für diese grundsätzlich dynamisch angelegt. Dies geschieht bei Verwendung der SPS Condition Monitoring Library automatisch.
Da alle Speicherbelegungen bei der Initialisierung erfolgen und somit die Initialisierung von Bausteinen unter Umständen eine relativ große Speichermenge beansprucht, kann sie an dieser Stelle - nicht jedoch später- auch aufgrund Speichermangels fehlschlagen.
Der belegte Speicher wird wieder freigegeben, wenn das Objekt gelöscht wird.
TwinCAT Routerspeicher für dynamisch erzeugte Objekte
Die Puffer, welche die TwinCAT 3 Condition Monitoring Library reserviert, werden bei der Initialisierung von Funktionsbausteinen im TwinCAT AMS Routerspeicher angelegt, so dass sie für eine Ausführung unter Echtzeitbedingungen zur Verfügung stehen. Bestimmte Funktionen wie z.B. hochauflösende Histogramme und Quantile, aber auch die Berechnung von Spektren mit sehr hoher Auflösung, erfordern wesentlich mehr Routerspeicher als herkömmliche Steuerungsprogramme. Deswegen ist es möglicherweise notwendig, den Routerspeicher zu vergrößern.
Routerspeicher anpassen
Die Standardgröße ist 32 MB (2 MB bis TwinCAT 3.1.4016). Die aktuelle Einstellung kann mit dem Dialogfenster AMS Router Information angezeigt werden.
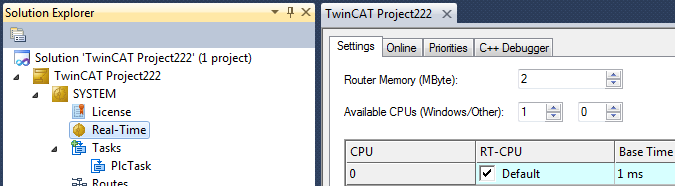
Um den Routerspeicher zu vergrößern wird in der TwinCAT Konfiguration unter System\ Real-Time\ Settings ein Wert in MB eingetragen und die Konfiguration aktiviert.
Die Anpassung des Routerspeichers erforderte bis TwinCAT 3.1.4022.4 einen Reboot des Zielgerätes!