TwinCAT 3 Autotuning - Erste Schritte
Im Folgenden werden die ersten wesentlichen Schritte zum Tuning einer TwinCAT kompatiblen Achse mit dem TwinCAT 3 Autotuning erläutert. Hierbei wird exemplarisch ein neues Projekt für das Tuning angelegt und alle notwendigen (und empfohlenen) Einstellungen durchgeführt. Diese lassen sich analog auch in bestehenden Projekten umsetzen.
| |
Verletzungsgefahr durch automatisches Loslaufen der Antriebsachse Zur Erstellung des Bode-Diagramms führt die Antriebsachse einen von den Einstellungen abhängigen Bewegungsablauf durch. Mit dem Start der Aufnahme läuft die Antriebsachse eigenständig entsprechend des eingestellten Bewegungsprofils los und kann Mensch und Material gefährden. Während der Aufnahme ist die Antriebsachse weiterhin in den Applikationskontext eingebunden (z. B. Freigaben, Überwachung, ...).
|

TwinCAT-Projekt anlegen
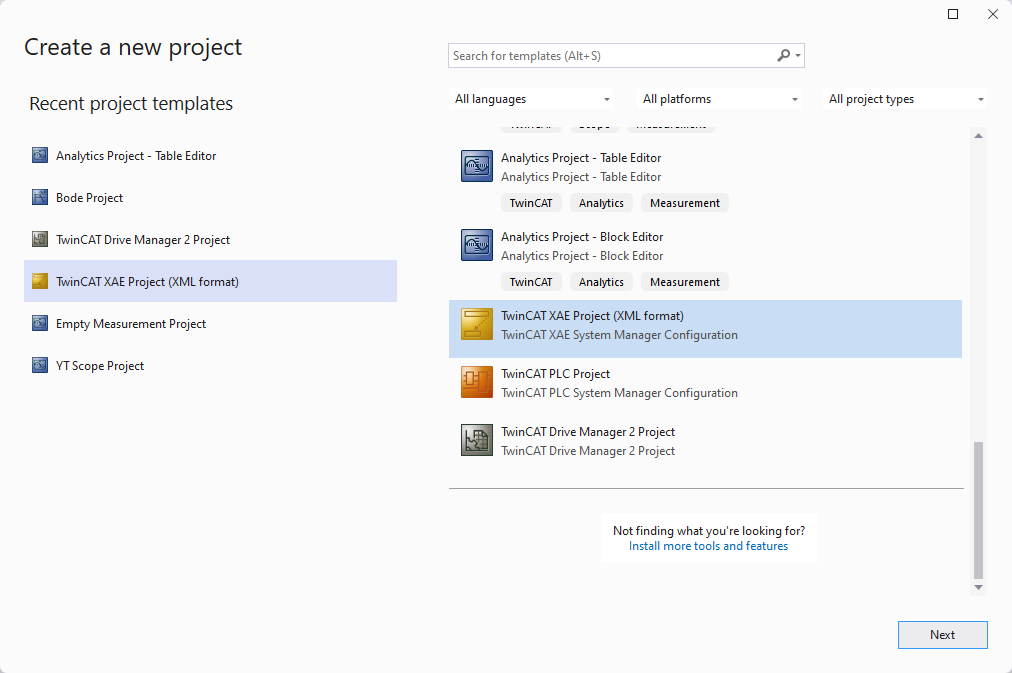
- 1. Öffnen Sie über File > New > Project ein neues TwinCAT XAE-Projekt (XML Format).
- Daraufhin wird eine neue Projektmappe angelegt und geöffnet.
Registrieren der Klassen
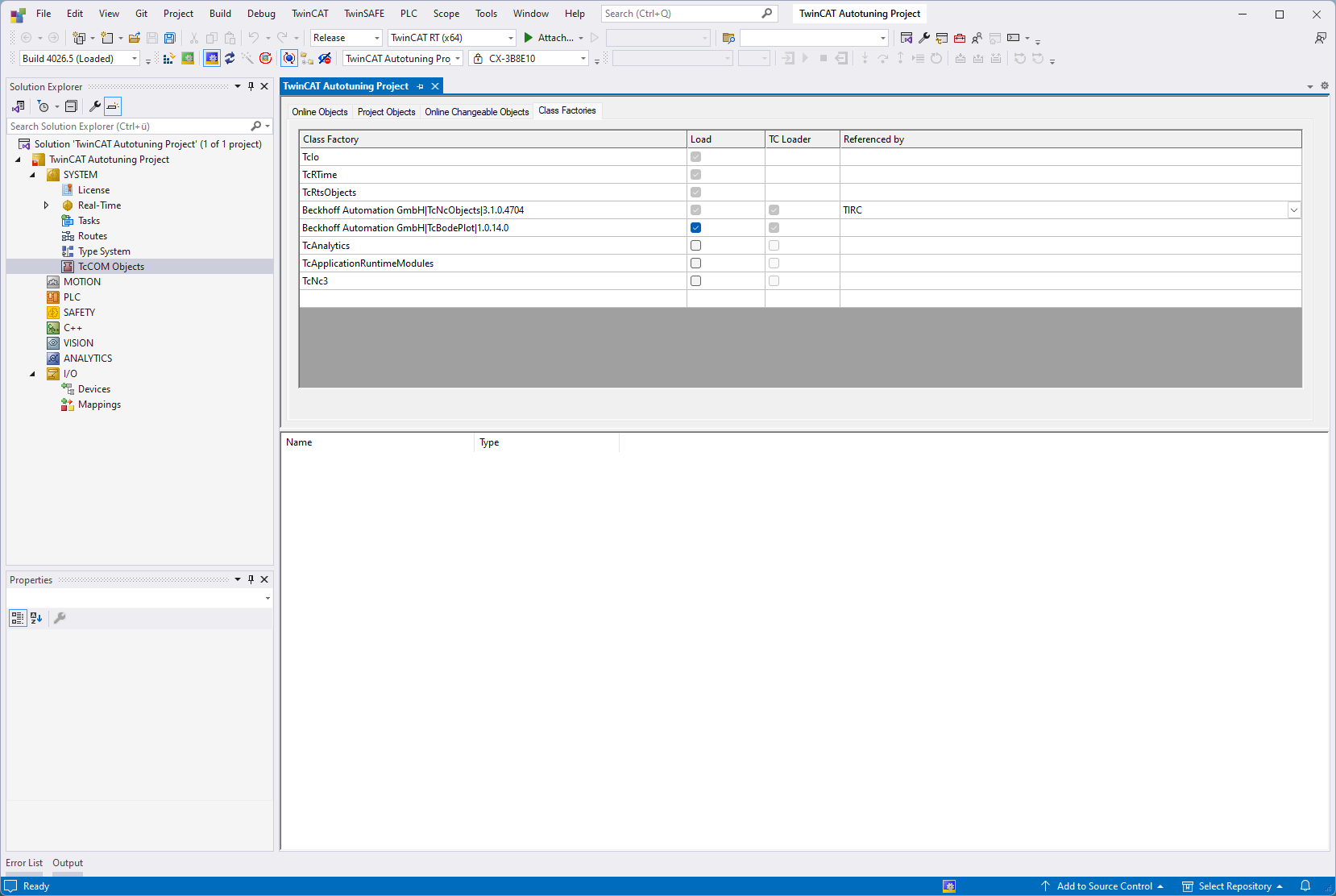
- Das TwinCAT 3 Autotuning basiert auf dem TwinCAT 3 Bode Plot. Dieser wird im TwinCAT-System von einem TcCOM-Objekt durchgeführt, welches automatisch erzeugt wird. Für die späteren Aufnahmen des Frequenzgangs ist es daher notwendig, die zugehörigen Klassenbeschreibungen für TcBodePlot (und TcNcObjects) bekannt zu machen.
- 1. Dies führen Sie unter dem Projektknoten TcCOM Objects in dem Reiter Class Factories durch.
Antriebe scannen und dynamischen Speicher anlegen
- 1. Suchen Sie im Projektbaum unter I/O > Devices auf dem gewählten Zielsystem nach verfügbaren Achsen, indem Sie Scan auswählen.
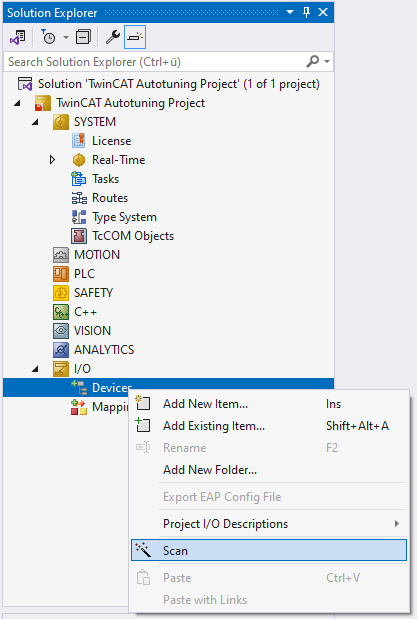
- Für die verfügbaren Achsen werden unter dem Knoten MOTION automatisch zugehörige Elemente angelegt.
- Die Kommunikation zwischen dem TcBodePlot und der NC / CNC erfolgt über das TcNcObjects und benötigt für das Oversampling im Antrieb einen dynamischen Speicherbereich.
- 2. Diesen fügen Sie am zugehörigen Device über das Kontextmenü durch Append Dynamic Container hinzu.
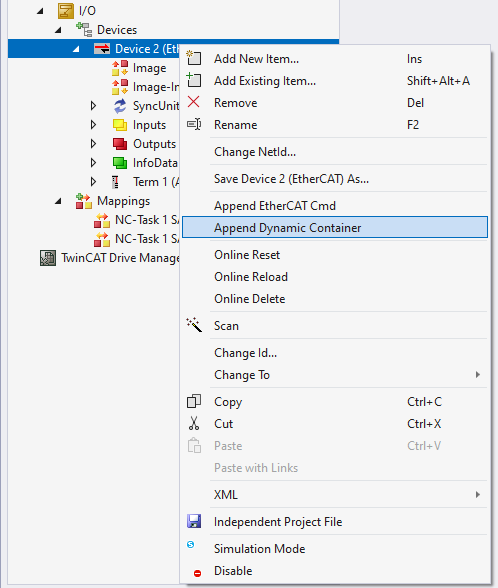
- 3. Im sich öffnenden Fenster für die Einstellung der Größe des Dynamic Containers müssen Sie auf eine Größe von 512 anpassen.
Zuerst muss ein Drive Manager 2-Projekt der TwinCAT Solution hinzugefügt werden.
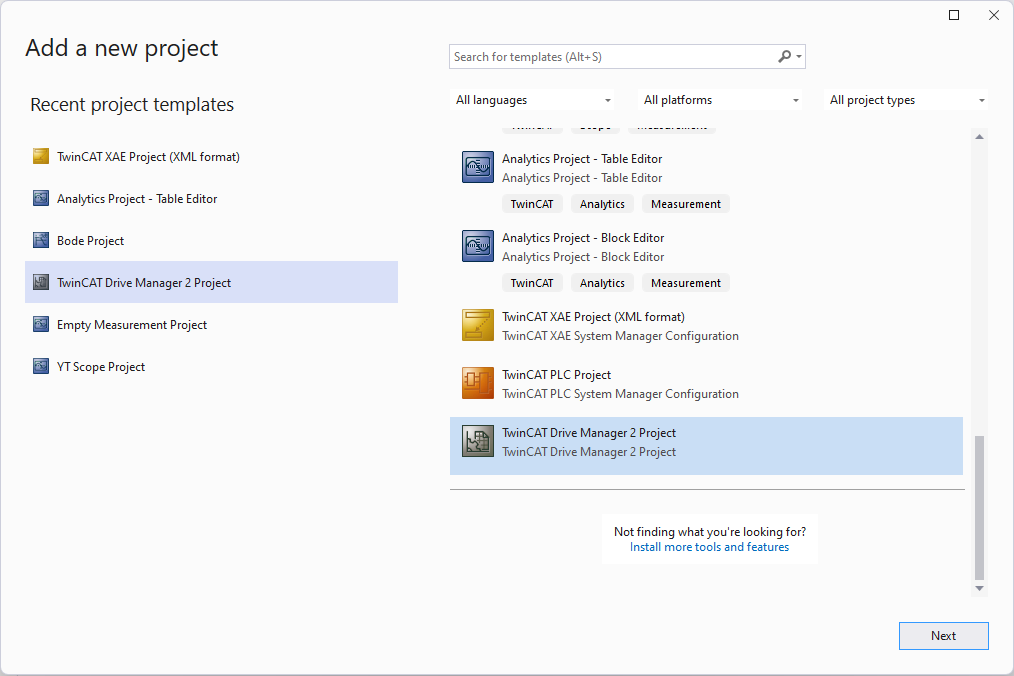
- Die Parametrierung und Ausführung des TwinCAT 3 Autotuning erfolgt über den TwinCAT 3 Drive Manager 2.
- 1. Fügen Sie der Projektmappe hierfür ein neues Projekt hinzu:
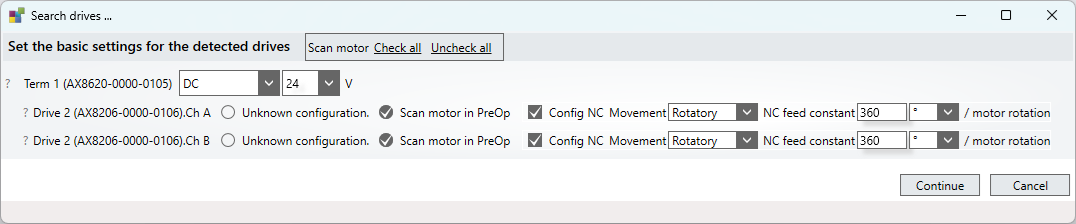
- 2. Öffnen Sie das angelegte Projekt und führen Sie die Suche nach Antrieben durch. Passen Sie falls notwendig die Parameter der erkannten Antriebe an.
Konfiguration im TwinCAT Drive Manager 2 (empfohlen)
- Für ein bestmögliches Ergebnis des Tunings wird empfohlen, die Verwendung von Stromsollwert-Filtern für den ausgewählten Antrieb zu aktivieren.
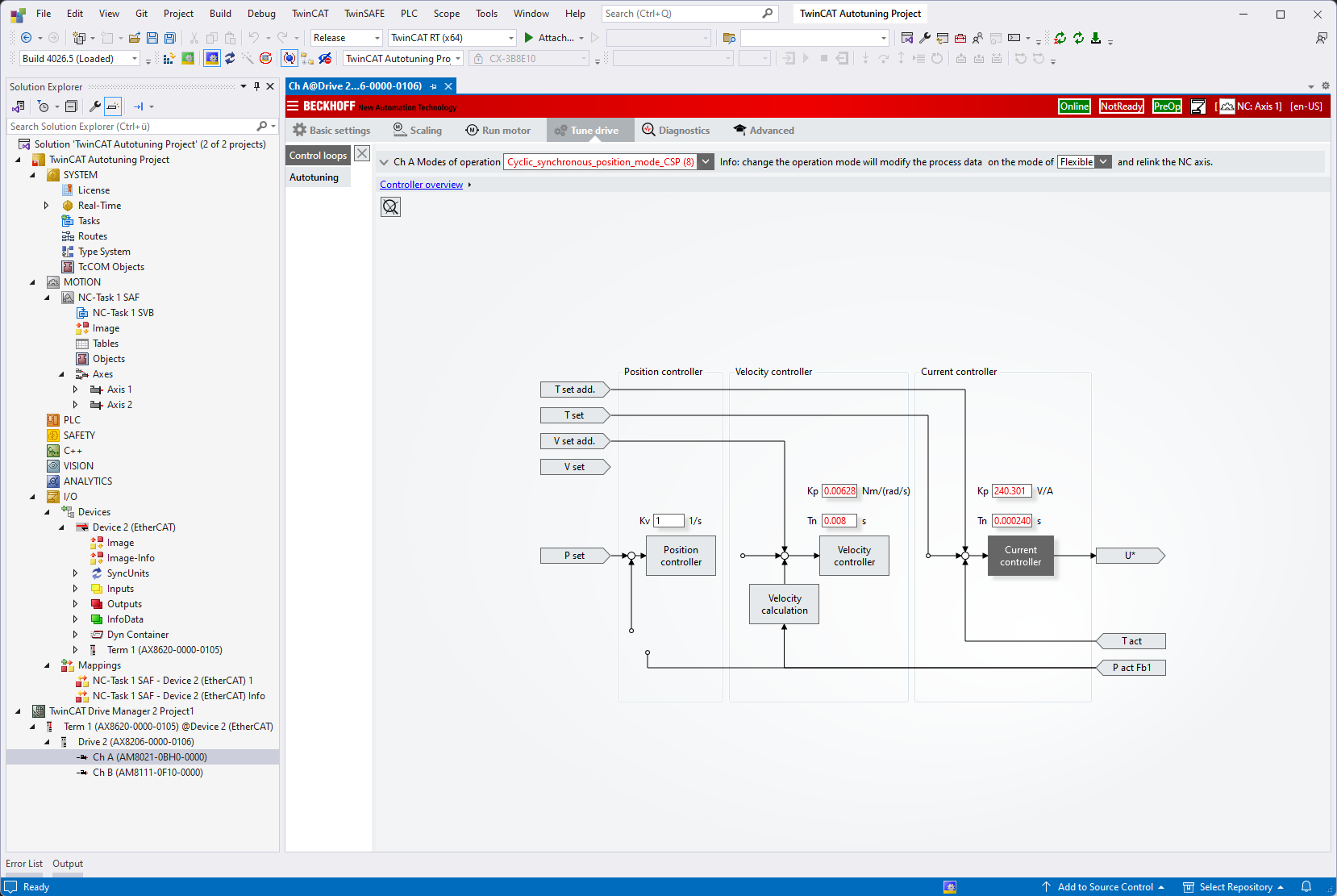
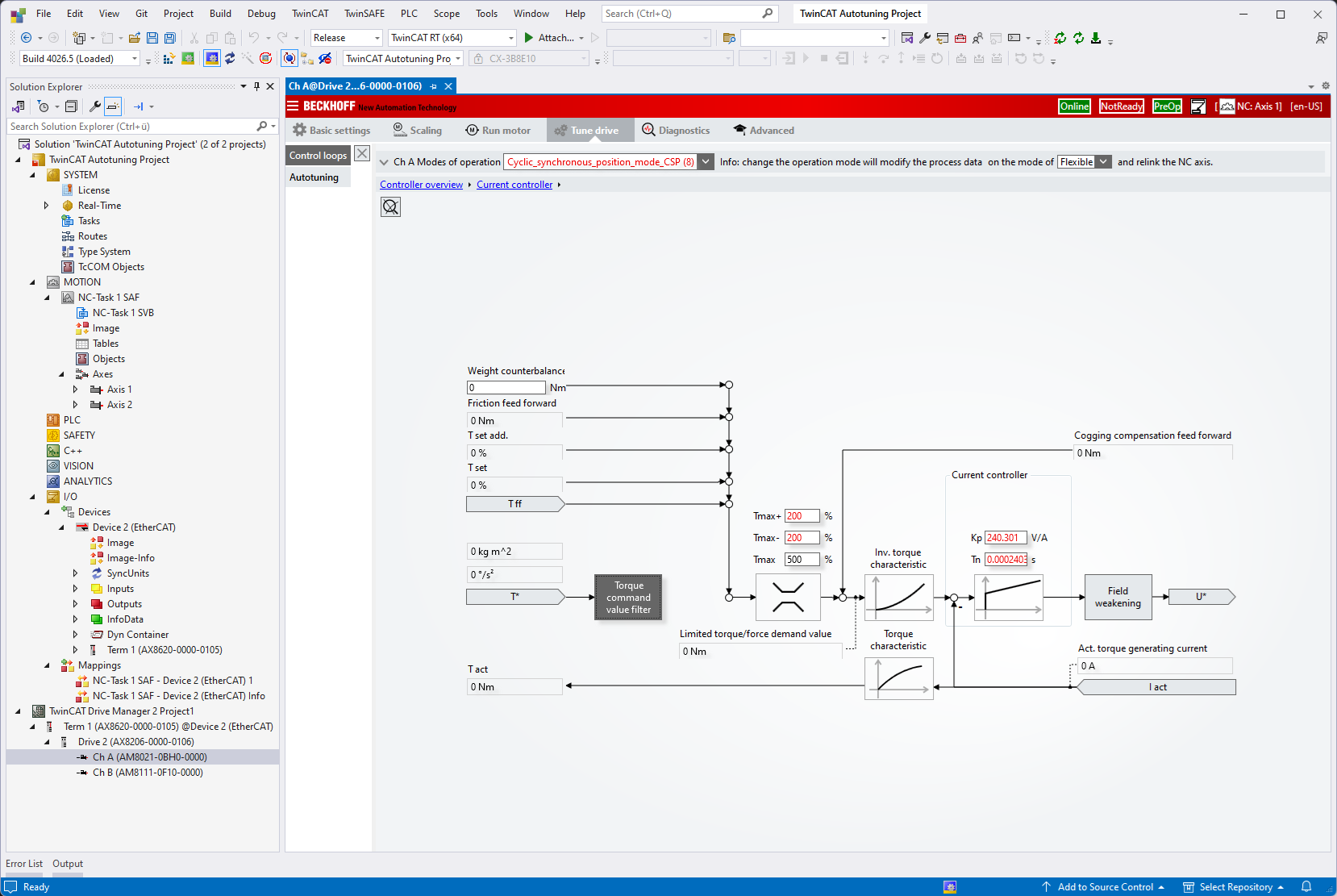
- 1. Wählen Sie im Drive Manager 2-Projekt für den gewünschten Antrieb den Reiter Tune drive aus.
- 2. Im sich öffnenden Fenster (Regler-Übersicht) wählen Sie den Stromregler (Current controller).
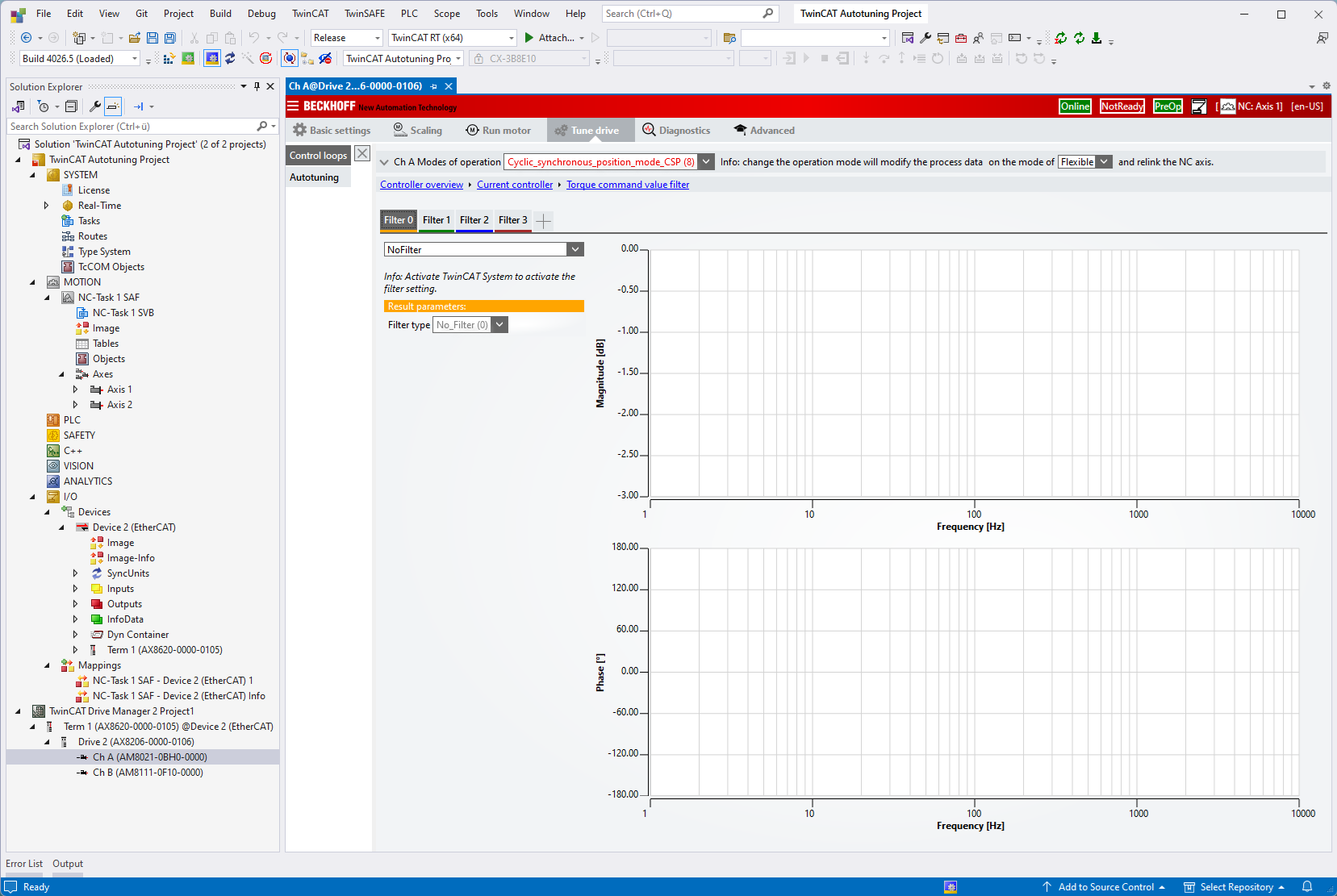
- 3. Anschließend öffnen Sie das Menü Torque command value Filter.
- 4. Fügen Sie je nach Möglichkeit einen oder mehrere unkonfigurierte Filter (NoFilter) hinzu.
- Diese werden im folgenden Tuning falls erforderlich automatisch entsprechend parametriert.
- 5. Nach einem (erneuten) Aktivieren der Solution sind die vorgenommenen Änderungen verfügbar.
- 6. Beachten Sie hierfür die Hinweise im Drive Manager 2-Projekt.
- 7. Führen Sie diesen Schritt falls notwendig noch einmal durch.
Starten des Tunings
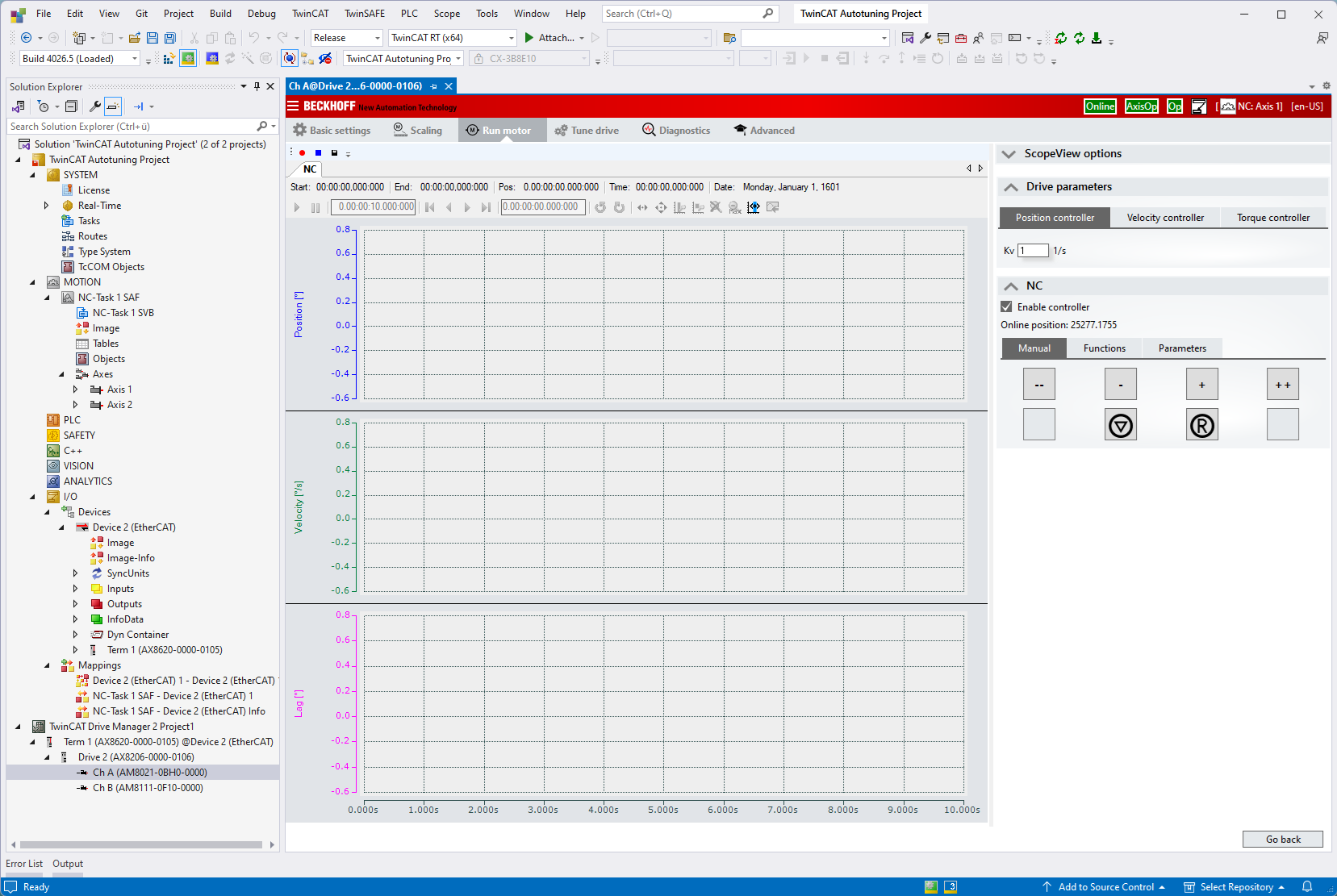
- Während der Durchführung des Tunings wird die Achse in Bewegung versetzt, sodass Sie hierfür die Regler aktivieren müssen.
- 1. Wählen Sie unter den Properties der NC den Reiter Run motor, aktivieren Sie den Regler unter Enable controller.
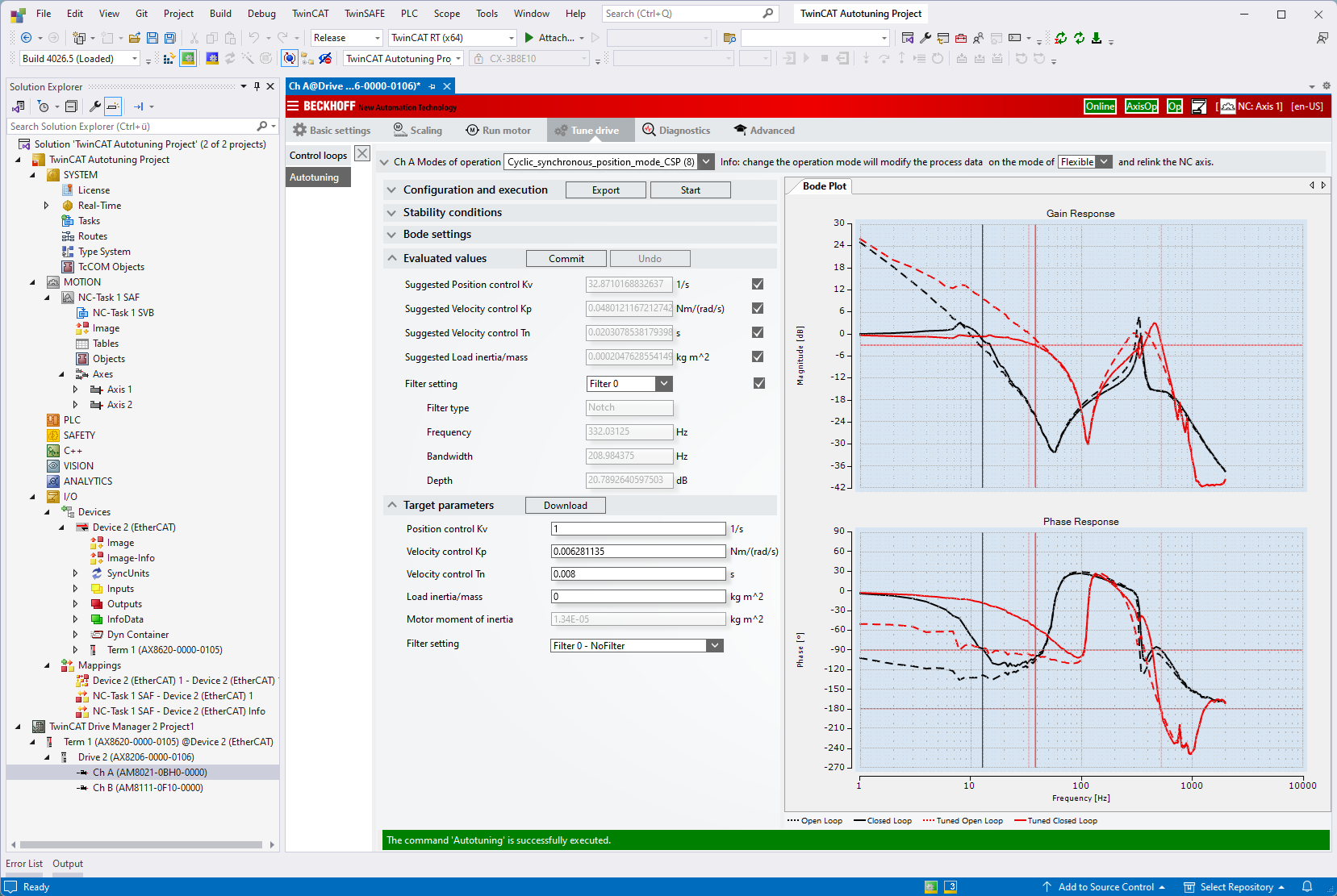
- 2. Wählen Sie bei scharf geschalteter Achse im Reiter Tune drive den Menüpunkt Autotuning und starten Sie den Vorgang mit einem Klick auf die Schaltfläche Start.
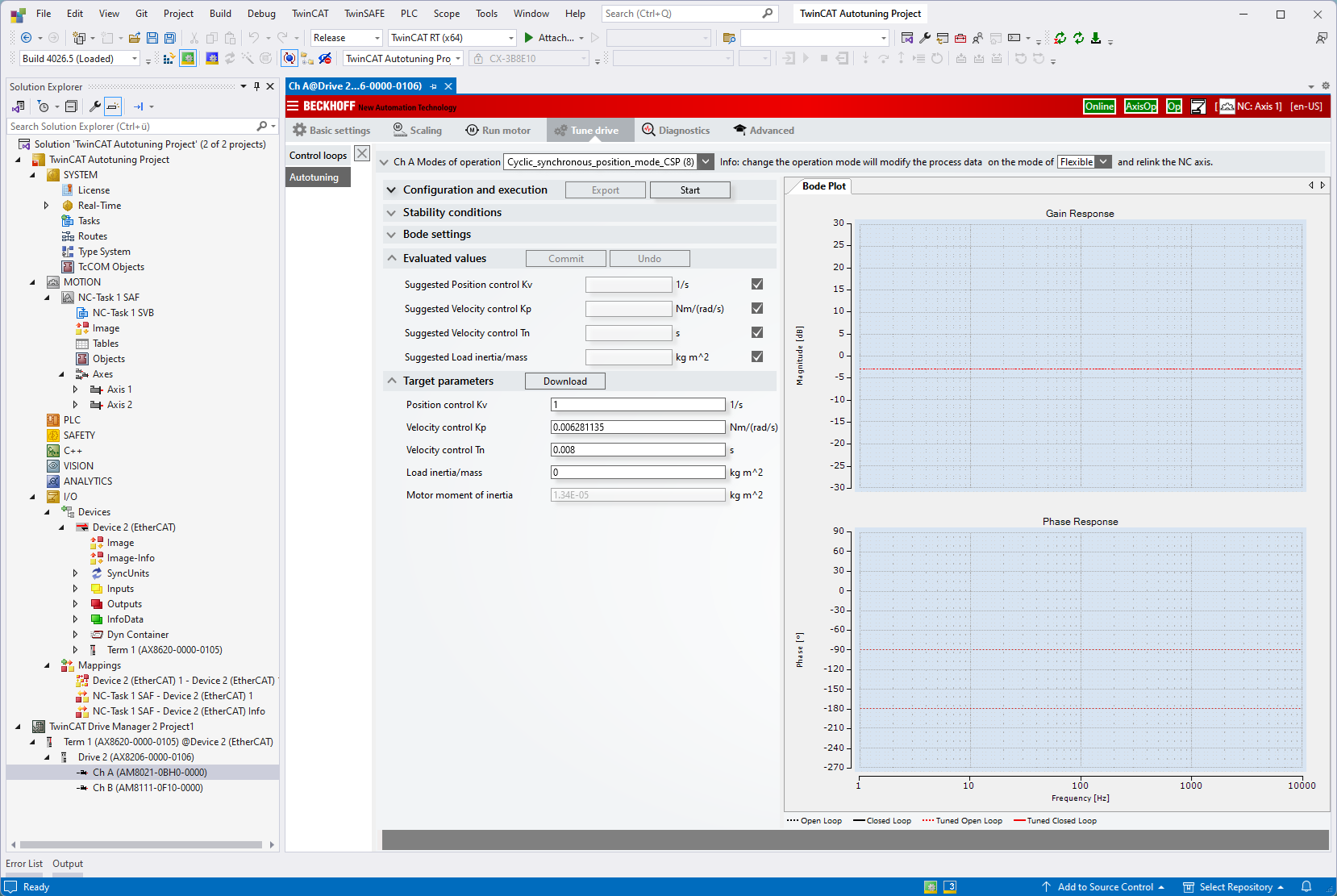
- 3. Nach erfolgreicher Berechnung der Antriebsparameter und der Durchführung einer Validierungsmessung haben Sie die Möglichkeit die vorgeschlagenen Werte zu übernehmen (Commit) und anschließend in den Antrieb herunterzuschreiben (Download).
- Für eine detaillierte Analyse, weiterer Verarbeitung der Ergebnisse oder zur Fehlerbehebung können die erzeugten Daten in ein TwinCAT 3 Bode Plot-Projekt exportiert werden.
Weitere Details hierzu finden Sie im Abschnitt Exportieren der Tuningresultate.