AM8xxx Smart System Diagnosis

Der AM8xxxSSD ermöglicht die Analyse eines Motors, der mit der Smart System Diagnosis-Funktionalität ausgestattet ist. Der verbaute Encoder nimmt Messwerte verschiedener, intern verbauter Sensoren auf. Dazu zählen die Temperatur und Luftfeuchtigkeit im Encoder, als auch die Beschleunigung in X- und Y-Richtung. Auf Basis dieser Messwerte werden verschiedene statistische Kenngrößen errechnet und eine Schwellwertüberwachung zur Detektion von Schocks durchgeführt.
Optional kann ein boolesches Signal für den Eingang Enable Execution ausgewählt werden, sodass der Algorithmus nur aktiv ist, wenn der Wert des ausgewählten Signals TRUE ist.
Konfigurationsoptionen
- Num Sections Humidity: Konfigurieren der Anzahl der Sektionen für die Analyse der Luftfeuchte im Encoder.
- Num Sections Temperature: Konfigurieren der Anzahl der Sektionen für die Analyse der Temperatur im Encoder.
- Num Bins RMS Acceleration: Konfigurieren der Anzahl der Histogramm-Bins für die Analyse der Beschleunigung.
- Threshold Shock: Schwellwert für den RMS der Beschleunigung zur Detektion von Schocks.
Ausgangswerte
- Humidity: Minimal, Maximal und Mittelwert der Luftfeuchte innerhalb des Encoders in %.
- Temperature: Minimal, Maximal und Mittelwert der Temperatur innerhalb des Encoders in °C.
- X RMS Acceleration: Minimal, Maximal und Mittelwert des RMS der Beschleunigung in X-Richtung in g.
- X Kurtosis Acceleration: Minimal, Maximal und Mittelwert der Kurtosis der Beschleunigung in X-Richtung.
- X Peak-Peak Acceleration: Minimal, Maximal und Mittelwert des Spitze-Spitze-Werts der Beschleunigung in X-Richtung in g.
- YRms Acceleration: Minimal, Maximal und Mittelwert des RMS der Beschleunigung in Y-Richtung in g.
- Y Kurtosis Acceleration: Minimal, Maximal und Mittelwert der Kurtosis der Beschleunigung in Y-Richtung.
- Y Peak-Peak Acceleration: Minimal, Maximal und Mittelwert des Spitze-Spitze-Werts der Beschleunigung in Y-Richtung in g.
- X Shock | Shock Detected:
TRUE, wenn der ein Schock in X-Richtung detektiert wird. Hierfür wird der Schwellwert des RMS der Beschleunigung überwacht. - X Shock | Count: Anzahl der Schocks X-Richtung.
- X Shock | Last Shock: Zeitstempel des zuletzt detektierten Schocks in X-Richtung.
- Y Shock | Shock Detected:
TRUE, wenn der ein Schock in Y-Richtung detektiert wird. Hierfür wird der Schwellwert des RMS der Beschleunigung überwacht. - Y Shock | Count: Anzahl der Schocks Y-Richtung.
- Y Shock | Last Shock: Zeitstempel des zuletzt detektierten Schocks in Y-Richtung.
- Total Shocks: Anzahl der Schocks in X- und Y-Richtung
- Sections Humidity: Zeitliche Verteilung der Luftfeuchte innerhalb des Encoders. (Section Timer)
- Sections Temperature: Zeitliche Verteilung der Temperatur innerhalb des Encoders. (Section Timer)
- X Rms Acceleration: Verteilung der Beschleunigung in X-Richtung. (Histogramm)
- Y Rms Acceleration: Verteilung der Beschleunigung in Y-Richtung. (Histogramm)
Vorbereitung
Damit die Sensorwerte für eine Analyse zur Verfügung stehen, müssen diese zum Prozessabbild des Antriebs hinzugefügt werden. Dieser Vorgang wird im Folgenden aufgezeigt.
- 1. Erstellen Sie ein TwinCAT-Projekt.
- 2. Scannen Sie die I/Os des TwinCAT-Projektes.
- 3. Fügen Sie zu der Solution ein Drive Manager-Projekt hinzu.
- 4. Wählen Sie den entsprechenden Kanal des Antriebs aus, an dem der Motor mit dem B/SSD-Fähigen Encoder angeschlossen ist.
- 5. Wählen Sie den Reiter Advanced an.
- 6. Im Unterpunkt Process data können weitere Prozessdaten hinzugefügt werden.
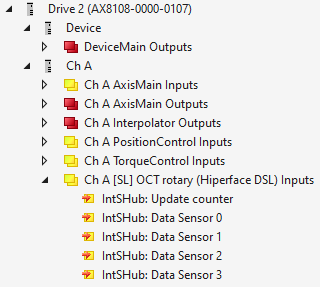
- 7. Fügen Sie folgende Prozessdaten hinzu:
IntSHub: Update counter
IntSHub: Data Sensor 0
IntSHub: Data Sensor 1
IntSHub: Data Sensor 2
IntSHub: Data Sensor 3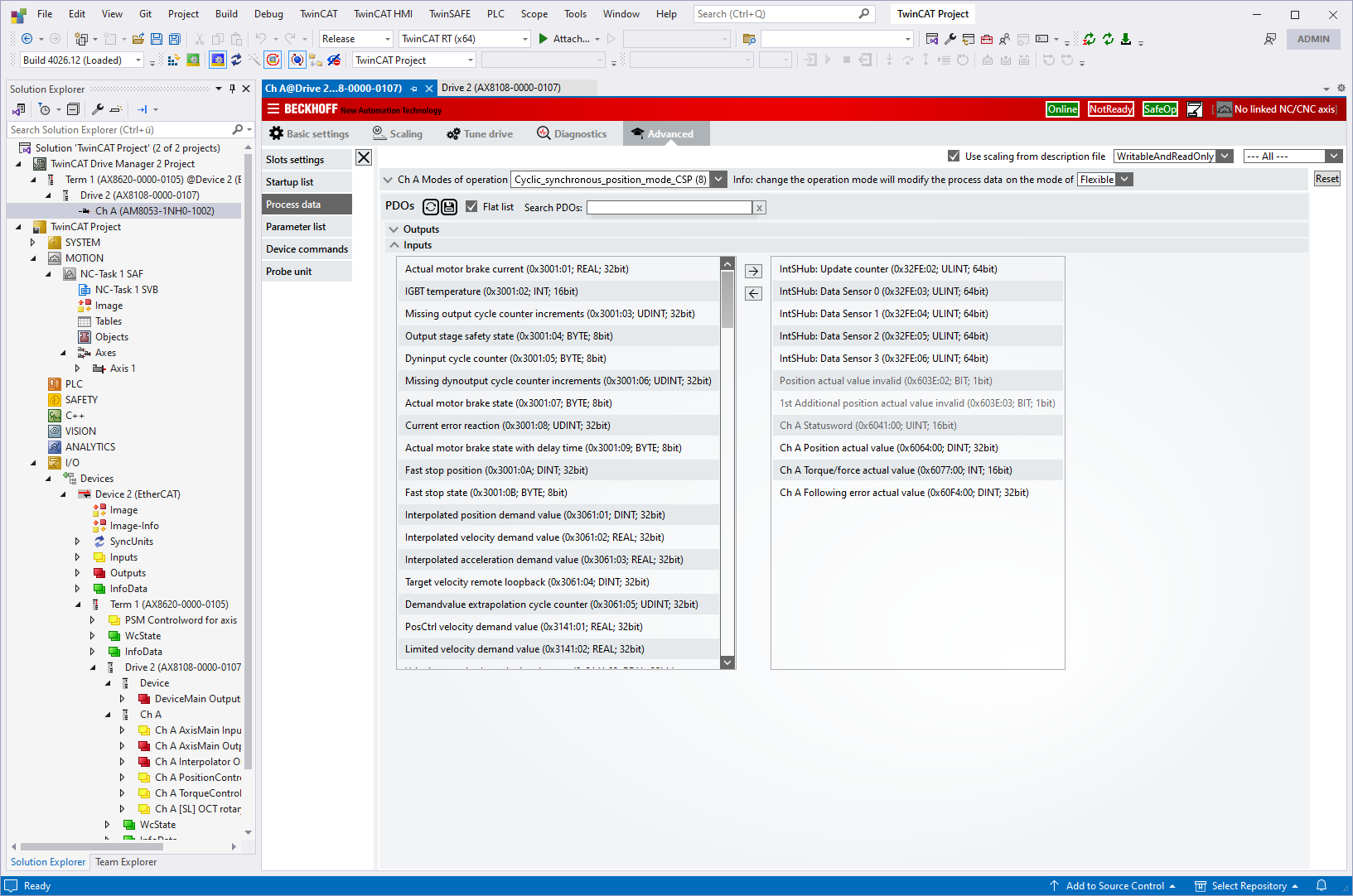
- Nach dem Hinzufügen der Prozessdaten werden diese im Knoten I/O angezeigt und stehen für die Analyse zur Verfügung.