Parametrierung in Simulink®
Verwenden des Embedded Coder zusammen mit TwinCAT
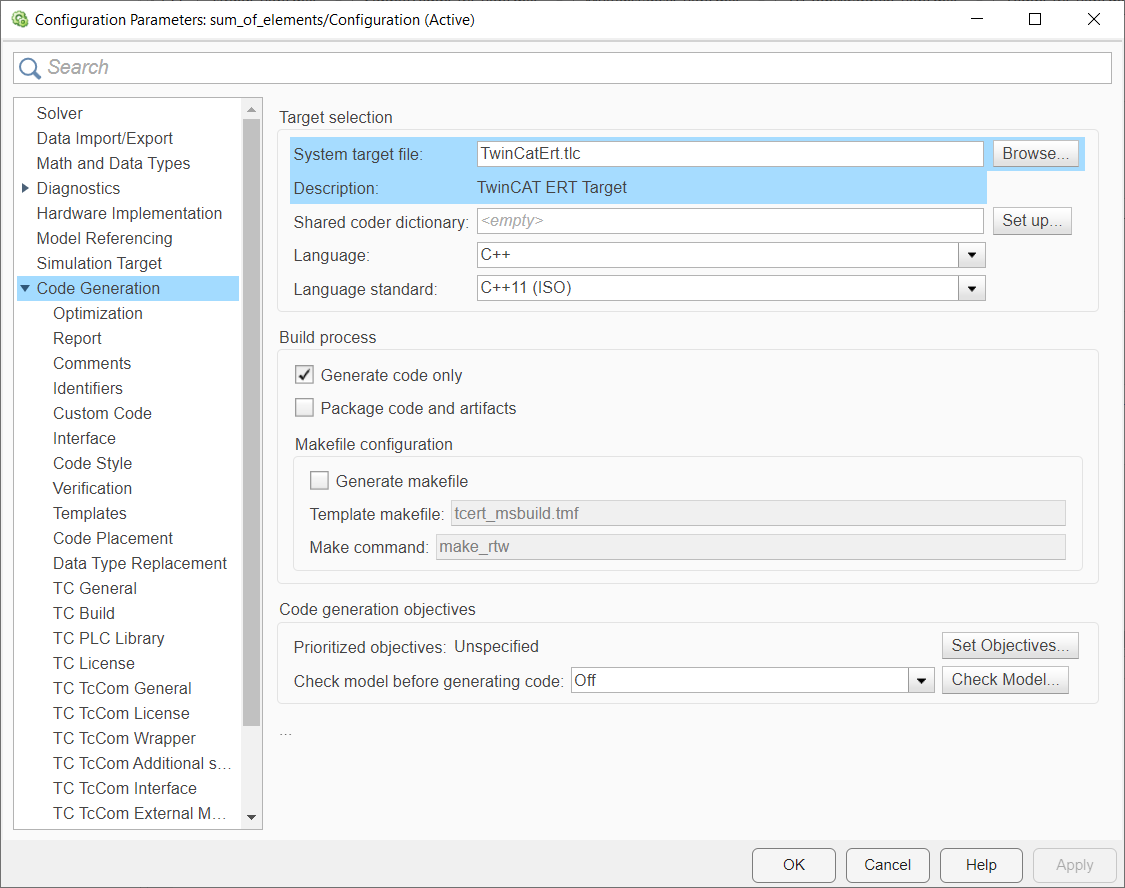
Stellen Sie das System target file auf TwinCatErt.tlc.
Command Line Interface (CLI): TwinCAT.ModuleGenerator.Simulink.ModelExportConfig.ShowModelParam(modelName,'SystemTargetFile','TwinCatErt.tlc');
Oder im User Interface (UI) über die Configuration Parameters im Simulink®-Modell unter
Code Generation > System target file.
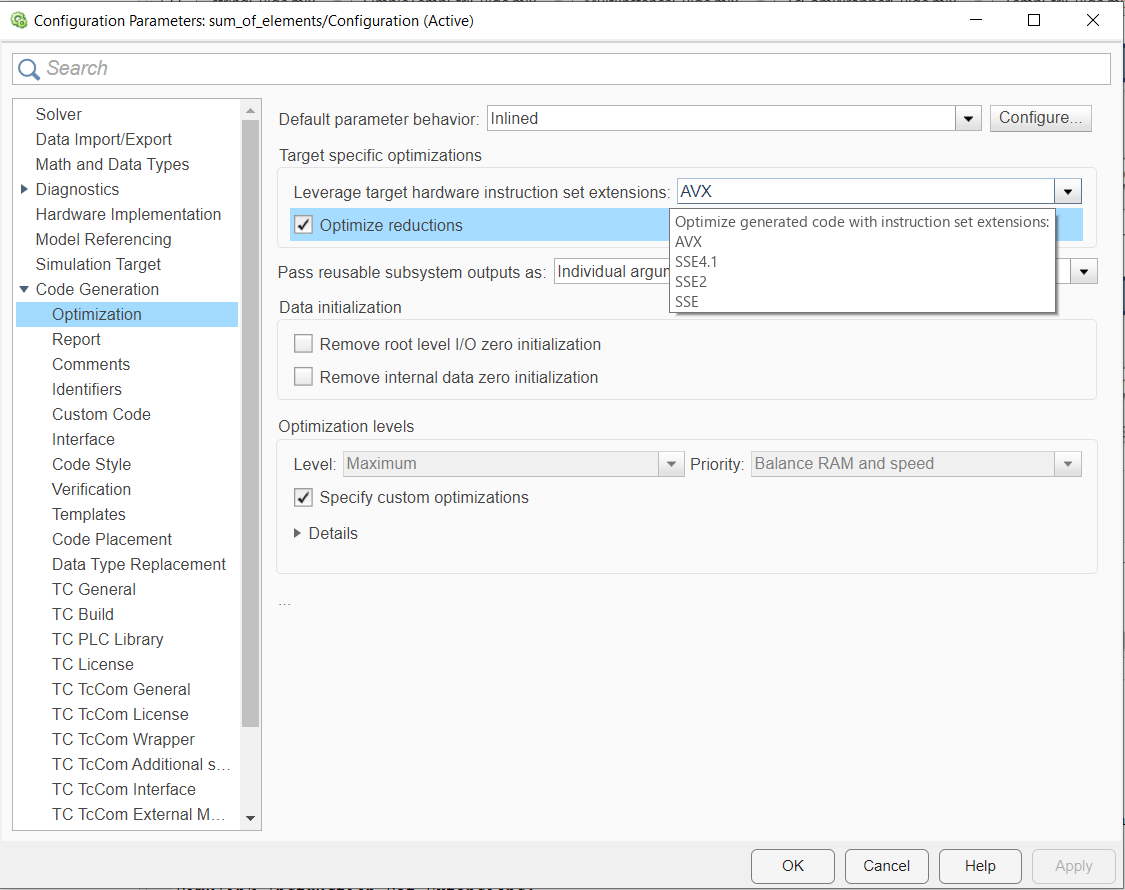
Beispiel in MATLAB®: SIMD-Befehlssatzerweiterungen
Im Beispiel “Simulink® Instruction Set Extensions” erfahren Sie, wie Sie ein Simulink®-Modell mit dem TwinCAT 3 Target for Embedded Coder® erzeugen, welches zur Beschleunigung der Modell-Ausführungszeit mit SIMD-Befehlssatzerweiterungen arbeitet.
TwinCAT.ModuleGenerator.Samples.Start('Simulink Instruction Set Extensions') | CPU des Target-Systems muss instruction sets unterstützen Stellen Sie sicher, dass das Zielsystem, auf dem Sie das generierte Objekt ausführen möchten, die eingestellte instruction-set-Erweiterung unterstützt. Die TwinCAT-Laufzeit prüft beim Laden des Objekts die Verfügbarkeit der instruction sets und vergleicht diese mit den im Objekt verwendeten instruction sets. Genügt die CPU nicht den Ansprüchen, wird das Objekt nicht geladen und im TwinCAT XAE eine entsprechende Fehlermeldung ausgegeben. |
Das Modell kann nach der Parametrierung gebaut werden über
Apps > Embedded Coder > Generate Code.