Build für unterschiedliche Plattformen
Unter dem Reiter TC Build können Sie diverse Einstellungen vornehmen, um zu spezifizieren, mit welchem Compiler für welche Zielsystem-Plattformen gebaut werden soll.
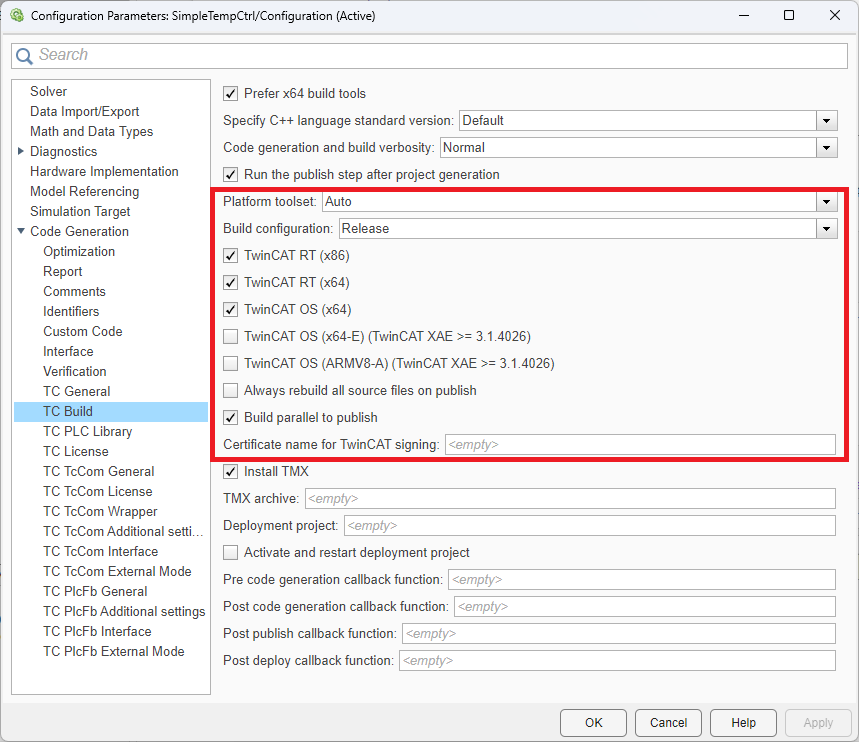
Plattform toolset:
Default „Auto“ nutzt immer die aktuellste Version. Über das Dropdown-Menü kann auch eine spezifische Version selektiert werden.
 | Zusammengehörige Versionen Microsoft Visual C++ 14.1 => VS 2017 |
Build configuration:
Release- oder Debug Treiber erstellen. Beachten Sie, dass ein Debug-Treiber in der Regel eine deutlich verlangsamte Ausführungszeit auf dem Zielsystem hat.
Always rebuild all source files on publish:
Der Simulink® Coder™ und das TwinCAT Target for Simulink® cashen einige Files, damit der Prozess für wiederholte Builds schneller läuft. Selektieren Sie diesen Parameter, damit immer alle Source Files neu gebaut werden.
Build parallel to publish:
Wenn mehrere Build-Plattformen selektiert sind, sind die Kompiliervorgänge unabhängig voneinander und werden nacheinander in Auftrag gegeben. Durch Aktivieren dieser Option werden alle Build-Prozesse parallel auf Ihrem Engineering System durchgeführt. Die Parallelisierung erfolgt durch das Betriebssystem. Um unnötige Wartezeiten zu vermeiden, sollten Sie immer nur für solche Plattformen Binaries erstellen, die Sie auch wirklich einsetzen.
Certificate name for TwinCAT signing
Tragen Sie hier, wenn nicht über eine Umgebungsvariable spezifiziert, Ihr OEM-Zertifikat Level 2 ein, um damit die erstellten Binaries zu signieren, siehe Einrichtung der Treibersignierung.
TwinCAT RT (x86)
Selektieren Sie diese Plattform, um Binaries für ein Zielsystem mit folgenden Spezifikationen zu bauen: Intel® oder AMD CPU, Windows 32-bit-Betriebssystem (TwinCAT-Plattformlevel 40 und größer).
TwinCAT RT (x64)
Selektieren Sie diese Plattform, um Binaries für ein Zielsystem mit folgenden Spezifikationen zu bauen: Intel® oder AMD CPU, Windows 64-bit Betriebssystem (TwinCAT-Plattformlevel 40 und größer).
TwinCAT OS (x64)
Selektieren Sie diese Plattform, um Binaries für ein Zielsystem mit folgenden Spezifikationen zu bauen: Intel® oder AMD CPU, TwinCAT/BSD Betriebssystem (TwinCAT-Plattformlevel 40 und größer).
Des Weiteren ist diese Plattform für die Ausführung mit der TwinCAT Usermode Runtime zu wählen.
TwinCAT OS (ARMV8-A)
Selektieren Sie diese Plattform, um Binaries für ein Zielsystem mit folgenden Spezifikationen zu bauen: Arm® Cortex®-A CPU, Beckhoff RT Linux® Betriebssystem (TwinCAT-Plattformlevel 20 und 30). Aktuell explizit für die Geräte CX82xx und CX9240.
TwinCAT OS (x64-E)
Selektieren Sie diese Plattform, um Binaries für ein Zielsystem mit folgenden Spezifikationen zu bauen: Intel® oder AMD CPU, Beckhoff Real-Time Linux® Betriebssystem (TwinCAT-Plattformlevel 40 und größer).
Hinweise zu Beckhoff Real-Time Linux®
| Treiber-Signierung für Beckhoff RT Linux® nicht erforderlich Für Beckhoff RT-Linux® ist keine Treiber-Signierung erforderlich. Für alle andere Plattformen ist dies zwingend notwendig. |
Zur Unterstützung der TwinCAT OS (ARMV8-A) und TwinCAT OS (x64-E) Plattformen ist die Komponente MSBuild Support for llvm (clang-cl) toolset bei der Installation von Visual Studio erforderlich. Diese muss manuell bei der Installation von Visual Studio selektiert werden.
Die TwinCAT OS (ARMV8-A) und TwinCAT OS (x64-E) Plattformen werden nur mit TwinCAT 3.1. build 4026 unterstützt.
Beachten Sie, dass unter TwinCAT Real-Time Linux® aktuell kein Debugger attached werden kann.