Verbinden mit dem External Mode
Sie können sich per External Mode aus Ihrer Simulink®-Umgebung auf ein laufendes TcCOM-Objekt oder eine Instanz des SPS-Funktionsbausteins in der TwinCAT XAR verbinden.
 | Einschränkung zum Code interface packaging Das Code interface packaging definiert das Verhalten bei mehreren Instanzen einer erstellen Klassen in TwinCAT. Soll der External Mode genutzt werden, ist die Einstellung C++ Class nicht erlaubt. |
| Simulationszeit in Simulink® auf „inf“ setzen Setzen Sie die Simulink®-Simulationszeit auf „inf“. Für den Betrieb in TwinCAT ergibt es keinen Sinn, nach einer definierten Zeit die Ausführung des Moduls zu stoppen. |
- Einstellungen bei der Code-Generierung in Simulink®
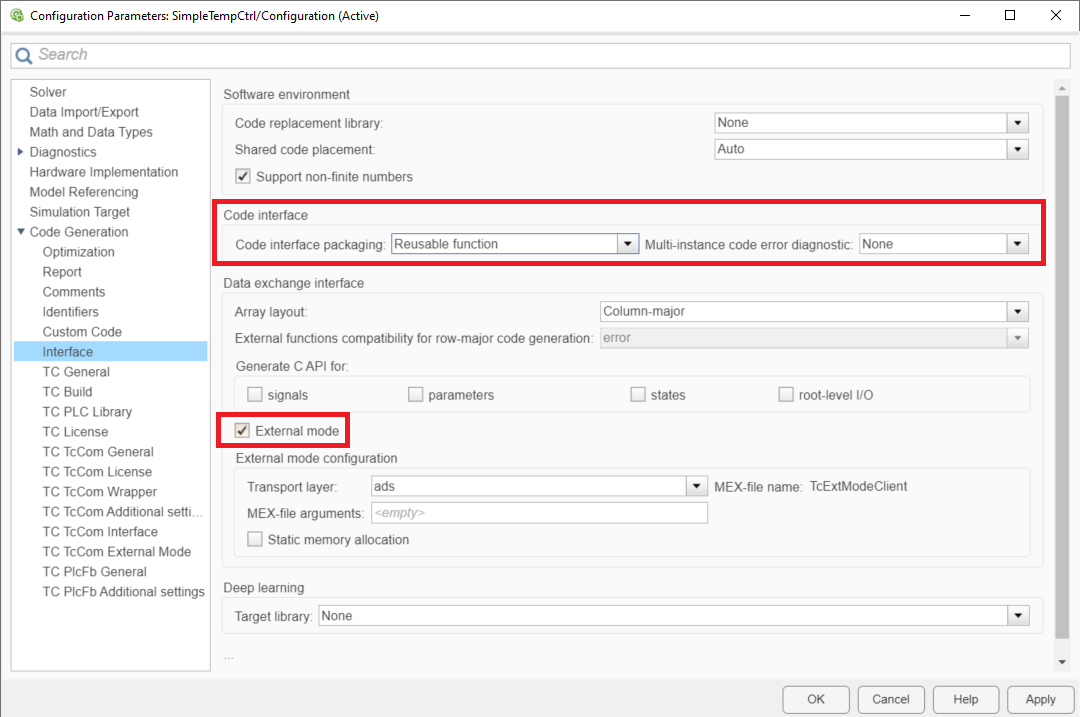
- 1. Setzen Sie unter Code Generation > Interface den Parameter External mode.
- Beachten Sie beim Code interface packaging:
- Nonreusable function: erlaubt
- Reusable function: erlaubt, Multi-instance code error diagnostic auf None stellen
- C++ Class: nicht erlaubt
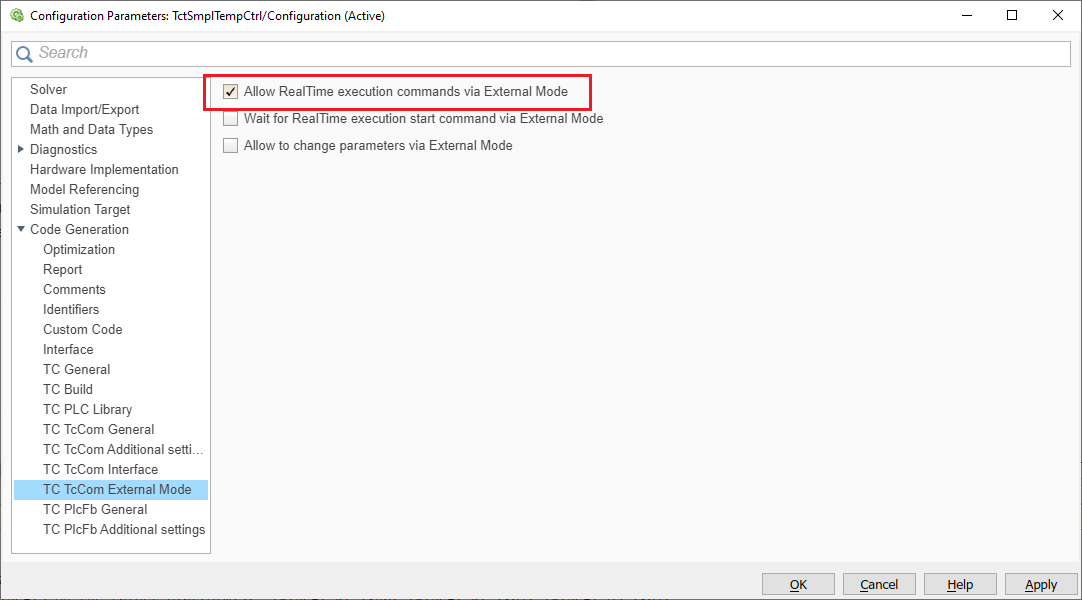
- 2. Definieren Sie die Berechtigungen des External mode (separat für TcCOM und PlcFb einstellbar).
- Im folgenden Screenshot exemplarisch für TcCOM gezeigt.
- Verbinden auf ein Laufzeit-Objekt mit dem External Mode
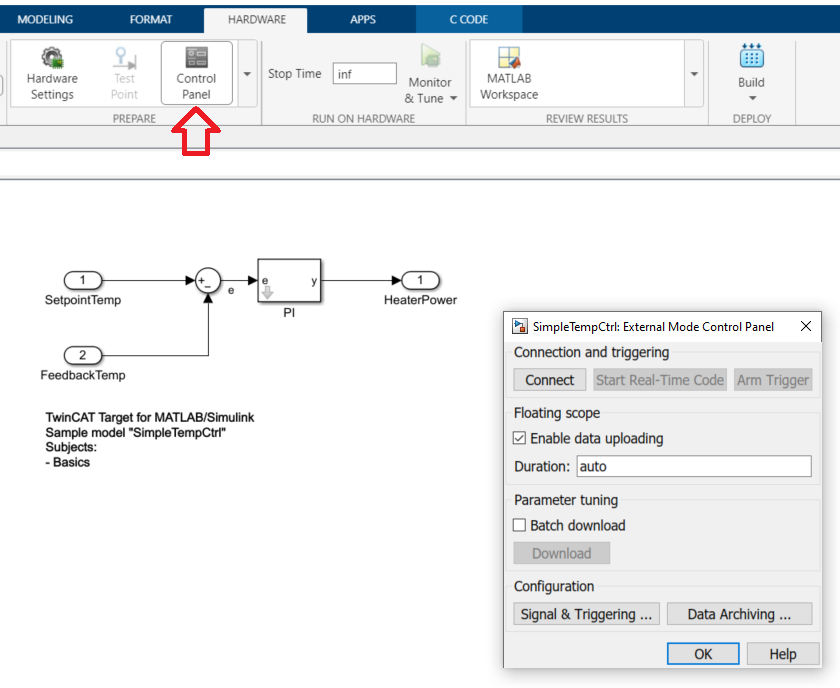
- 3. Öffnen Sie das External Mode Control Panel.
- 4. Wählen Sie Connect.
- 5. Wählen Sie das verbundene Target und die Objekt-Instanz aus.
- Nach Auswahl von OK sind Sie mit dem Objekt verbunden. Der Button Connect auf dem External Mode Control Panel hat sich zu Disconnect geändert und Sie können in Simulink® die vom Target übertragene Simulationszeit sehen.
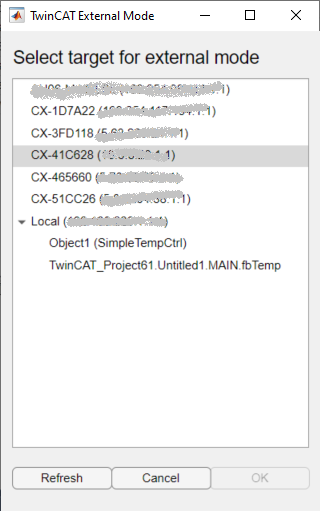
Wie in obiger Grafik zur Auswahl des Objekts in einem Target zu sehen ist, ist der External Mode sowohl für TcCOM Instanzen als auch für PLC-FB Instanzen verfügbar.
| Bidirektionale ADS-Route notwendig Für den External Mode ist eine bidirektionale ADS-Route notwendig. Unidirektionale Routen führen zu einem Timeout in der Kommunikation. |