FB_Write_IuM_EL6631_0010
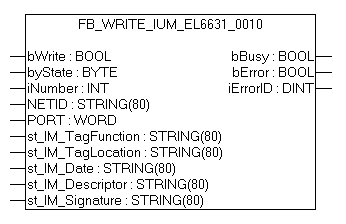
Dieser Baustein schreibt I&M1, I&M2, I&M3 und I&M4 (Identification & Maintenance) Daten nach ProfiNET-Spezifikation über EtherCAT als String
auf das ProfiNET-Gerät.
VAR_INPUT
VAR_INPUT
bWrite : BOOL;
NETID : STRING; (* AMS NET ID EtherCAT Master *)
PORT : WORD; (* EtherCAT Slave address *)
byState : BYTE; (* Bit 0 -> I&M1 || Bit 1 -> I&M2 || Bit 2 -> I&M3 || Bit 3 -> I&M4*)
iNumber : INT:=0; (* "0"=EL6631-0010 or "1"=vitual EL6631-0010*)
st_IM_TagFunction : STRING; (* I&M1 byState.0=TRUE*)
st_IM_TagLocation : STRING; (* I&M1 byState.0=TRUE*)
st_IM_Date : STRING; (* I&M2 byState.1=TRUE*)
st_IM_Descriptor : STRING; (* I&M3 byState.2=TRUE*)
st_IM_Signature : STRING; (* I&M4 byState.3=TRUE*)
END_VAR
bWrite: Über eine positive Flanke an diesem Eingang wird der Baustein aktiviert und die I&M Daten in das ausgewählte ProfiNET-Gerät geschrieben.
NETID: AMS Net ID des Controllers
PORT: Port über den der Controller mit dem Gerät kommuniziert ( Port = Device ID + 1000hex )
byState: Über dieses Byte kann ausgewählt werden, welche I&M Daten geschrieben werden sollen.
iNumber : Mit einer Klemme können 2 ProfiNET-Geräte abgebildet werden. Über iNumber ( "0" oder "1" ) wird das Gerät ausgewählt, für das die I&M Daten geschrieben werden sollen.
st_IM_TagFunction: Label für die Funktion des Gerätes wird auf das Gerät geschrieben.
st_IM_Taglocation: Label für den Einbauort des Gerätes wird auf das Gerät geschrieben.
st_IM_Date: Datum des Geräteeinbaus wird auf des Gerät geschrieben.
st_IM_Descriptor: Beschreibung des Herstellers wird auf das Gerät geschrieben.
st_IM_Signature: Signatur des Herstellers wird auf das Gerät geschrieben.
VAR_OUTPUT
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
iErrorID : DINT;
END_VAR
bBusy : Bei der Aktivierung des Funktionsbausteins wird dieser Ausgang gesetzt und bleibt gesetzt, bis eine Rückmeldung erfolgt. Während Busy = TRUE wird an den Eingängen kein neuer Befehl angenommen.
bError : Sollte ein Fehler bei der Übertragung des Kommandos erfolgen, dann wird dieser Ausgang gesetzt, nachdem der bBusy-Ausgang zurückgesetzt wurde.
iErrorID: Liefert bei einem gesetzten bError-Ausgang eine ADS-Fehlernummer.
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS Bibliotheken |
|---|---|---|
TwinCAT v2.11.0 R3 | PC or CX (x86, ARM) | TcProfinetDiag.Lib |