FB_SoERead_ByDriveRef
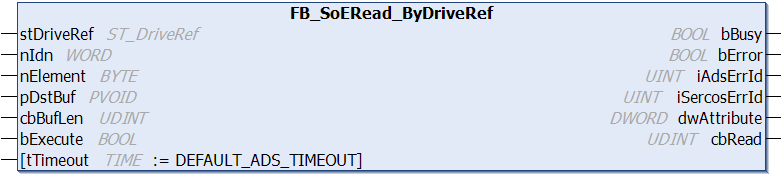
Mit dem Funktionsbaustein FB_SoeRead_ByRef können Antriebsparameter mit Hilfe des "Sercos over EtherCAT (SoE)"-Protokolls gelesen werden. Dazu muss der Slave eine Mailbox besitzen und das SoE-Protokoll unterstützen. Der zu lesende Antriebsparameter wird mit den Parametern nIdn (Identification number), nElement und stDriveRef spezifiziert.
Über die globale Variable bSeqReadDrvAttrAndValue := TRUE der Tc2_EtherCAT-Bibliothek kann ein sequentieller Zugriff auf Attribut und Wert erzwungen werden. Der Standard-Wert dieser Variablen ist FALSE. Geräte der AX5xxx-Serie erlauben den parallelen und den sequentiellen Zugriff auf Attribut und Wert. Bei Geräten von Fremdherstellern kann es erforderlich sein, den Zugriff auf Attribut und Wert zu separieren, was den Zugriff aber insgesamt um einige Zyklen verlangsamt.
 Eingänge
Eingänge
VAR_INPUT
stDriveRef : ST_DriveRef; (* contains sNetID of EcMaster, nSlaveAddr of EcDrive, nDriveNo of EcDrive, either preset or read from NC *)
nIdn : WORD; (* SoE IDN: e.g. "S_0_IDN + 1" for S-0-0001 or "P_0_IDN + 23" for P-0-0023*)
nElement : BYTE; (* SoE element.*)
pDstBuf : PVOID; (* Contains the address of the buffer for the received data. *)
cbBufLen : UDINT; (* Contains the max. number of bytes to be received. *)
bExecute : BOOL; (* Function block execution is triggered by a rising edge at this input.*)
tTimeout : TIME := DEFAULT_ADS_TIMEOUT;(* States the time before the function is cancelled. *)
END_VARName | Typ | Beschreibung |
|---|---|---|
stDriveRef | ST_DriveRef | Die Referenz auf den Antrieb kann im System Manager direkt in die SPS gelinkt werden. Hierzu muss eine Instanz der ST_PlcDriveRef verwendet werden und die NetID vom Bytearray in einen String konvertiert werden. |
nIdn | WORD | Identifikations-Nummer des zu lesenden Parameters |
nElement | BYTE | Element-Nummer des zu lesenden Parameters |
pDstBuf | PVOID | Adresse (Pointer) auf den lesenden Puffer |
cbBufLen | UDINT | Maximal verfügbare Puffergröße für die zu lesenden Daten in Bytes |
bExecute | BOOL | Über eine positive Flanke an diesem Eingang wird der Baustein aktiviert. |
tTimeout | TIME | Maximale Zeit, die bei der Ausführung des Funktionsbausteins nicht überschritten werden darf. |
nElement
Element-Nummer des zu lesenden Parameters. Folgende Werte sind zulässig:
Wert | Beschreibung |
|---|---|
0x01 | Data Status |
0x02 | Name (read only) |
0x04 | Attribut |
0x08 | Einheit |
0x10 | Minimum |
0x20 | Maximum |
0x40 | Wert |
0x80 | Default |
 Ausgänge
Ausgänge
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
iAdsErrId : UINT;
iSercosErrId : UINT;
dwAttribute : DWORD;
cbRead : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
bBusy | BOOL | Dieser Ausgang wird bei der Aktivierung des Funktionsbausteins gesetzt und bleibt gesetzt, bis eine Rückmeldung erfolgt. |
bError | BOOL | Dieser Ausgang wird gesetzt, nachdem der bBusy-Ausgang zurückgesetzt wurde, wenn bei der Übertragung des Kommandos ein Fehler auftritt. |
iAdsErrId | UINT | Liefert bei gesetztem bError-Ausgang den ADS-Fehlercode des zuletzt ausgeführten Befehls. |
iSercosErrId | UINT | Liefert bei gesetztem bError-Ausgang den Sercos-Fehler des zuletzt ausgeführten Befehls. |
dwAttribute | DWORD | Liefert das Attribut des Sercos-Parameters. |
cbRead | UDINT | Anzahl der erfolgreich gelesenen Datenbytes |
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS- Bibliotheken |
|---|---|---|
TwinCAT v3.1.0 | PC oder CX (x86, x64, Arm®) | Tc2_EtherCAT |