FB_EcSoeWrite
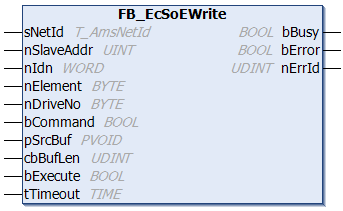
Mit dem Funktionsbaustein FB_EcSoeWrite können Antriebs-Parameter mit Hilfe des "Sercos over EtherCAT (SoE)"-Protokolls beschrieben werden. Dazu muss der Slave eine Mailbox besitzen und das SoE-Protokoll unterstützen. Der zu schreibende Antriebs-Parameter wird mit den Parametern nIdn (Identification number), nElement und nDriveNo spezifiziert.
 Eingänge
Eingänge
VAR_INPUT
sNetId : T_AmsNetId;
nSlaveAddr : UINT;
nIdn : WORD;
nElement : BYTE;
nDriveNo : BYTE;
pCommand : BOOL;
pSrcBuf : PVOID;
cbBufLen : UDINT;
bExecute : BOOL;
tTimeout : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Typ | Beschreibung |
|---|---|---|
sNetId | String, der die AMS-Netzwerkkennung des EtherCAT-Master-Gerätes enthält. | |
nSlaveAddr | UINT | Feste Adresse des EtherCAT-Slaves, an den das SoE-Write-Kommando geschickt werden soll. |
nIdn | WORD | Identifikations-Nummer des zu schreibenden Parameters. |
nElement | BYTE | Element-Nummer des zu schreibenden Parameters |
nDriveNo | BYTE | Nummer des Antriebs |
bCommand | BOOL | Dieser Parameter sollte gesetzt werden, wenn interne Kommando-Ausführung verwendet werden soll. |
pSrcBuf | PVOID | Adresse (Pointer) auf den Sendepuffer |
cbBufLen | UDINT | Anzahl der zu sendenden Daten in Bytes |
bExecute | BOOL | Über eine positive Flanke an diesem Eingang wird der Baustein aktiviert. |
tTimeout | TIME | Maximale Zeit, die bei der Ausführung des Funktionsbausteins nicht überschritten werden darf. |
nElement
Element-Nummer des zu schreibenden Parameters. Folgende Werte sind zulässig:
Wert | Beschreibung |
|---|---|
0x01 | Data Status |
0x02 | Name (read only) |
0x04 | Attribut |
0x08 | Einheit |
0x10 | Minimum |
0x20 | Maximum |
0x40 | Wert |
0x80 | Default |
 Ausgänge
Ausgänge
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrId : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
bBusy | BOOL | Dieser Ausgang wird bei der Aktivierung des Funktionsbausteins gesetzt und bleibt gesetzt, bis eine Rückmeldung erfolgt. |
bError | BOOL | Dieser Ausgang wird gesetzt, nachdem der bBusy-Ausgang zurückgesetzt wurde, wenn bei der Übertragung des Kommandos ein Fehler auftritt. |
nErrId | UDINT | Liefert bei einem gesetzten bError-Ausgang den ADS-Fehlercode des zuletzt ausgeführten Befehls. |
Beispiel für eine Implementierung in ST:
PROGRAM TEST_SoEWrite
VAR
fbSoeWrite : FB_EcSoEWrite;
sNetId : T_AmsNetId:= '172.16.2.131.2.1';
bExecute : BOOL;
nSlaveAddr : UINT := 1006;
nIdn : WORD := 15;
nElement : BYTE := 0;
nDriveNo : BYTE := 0;
bCommand : BOOL := FALSE;
val : UINT;
bError : BOOL;
nErrId : UDINT;
END_VAR
fbSoEWrite(sNetId:= sNetId,nSlaveAddr :=nSlaveAddr, nIdn := nIdn, nElement:=nElement, nDriveNo := nDriveNo,bCommand:=bCommand, pSrcBuf:= ADR(val), cbBufLen:=SIZEOF(val),bExecute:=bExecute);
bError := fbSoEWrite.bError;
nErrId := fbSoEWrite.nErrId;Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS- Bibliotheken |
|---|---|---|
TwinCAT v3.1.0 | PC oder CX (x86, x64, Arm®) | Tc2_EtherCAT |