Prozessabbild einer NC-Achse
Über das Prozessabbild einer Achse wird diese mit unterschiedlichen Antriebskomponenten verbunden. Im einfachsten Fall wird ein Link von der Achse zu einem Antrieb hergestellt und notwendige Verknüpfungen der Prozessabbilder werden automatisch durchgeführt. Im Einzelfall, insbesondere wenn in das System unbekannte Hardwarekomponenten eingebunden werden, müssen solche Verknüpfungen von Hand hergestellt werden. Im Folgenden ist dafür das Prozessabbild einer NC-Achse beschrieben.
Hinweis | |
Die hier beschriebenen Datenstrukturen sind eine interne Schnittstelle zwischen NC‑Treiber und angeschlossener Antriebshardware. Diese Schnittstelle wird stetig weiterentwickelt und kann sich in Zukunft ändern. |
Encoder-Prozessabbild einer Achse
Über das Encoder-Prozessabbild (zyklischer Datenaustausch) werden unterschiedliche Geber-Hardware bzw. entsprechende Busklemmen zur Positionserfassung einer Achse angebunden. Soweit diese Hardware direkt vom System unterstützt wird, ist keine manuelle Konfiguration einzelner Variablen notwendig.
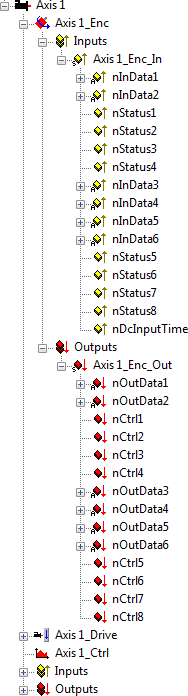
Eingangsdaten des Encoder-Prozessabbildes einer Achse
I/O-Variable | Beschreibung | Anmerkung |
|---|---|---|
nInData1 | Aktuelle Istposition des Encoders bzw. des Drives in Inkrementen. Der Inkrementalwert wird durch die NC aufbereitet und mathematisch zur Istposition in physikalischen Einheiten, wie z. B. mm oder Grad, verarbeitet. Überläufe des Inkrementalwertes werden durch die NC mitgezählt. Das System macht üblicherweise keinen Unterschied zwischen Inkremental- und Absolutgebern. (Siehe auch Encoder-Parameter Referenzsystem INC/ABS.) | Einheit: Inkremente [INC] |
nInData2 | Optionale Latch-Istposition des Encoders bzw. des Drives in Inkrementen. Der Inkrementalwert wird durch die NC aufbereitet und mathematisch zur Istposition in physikalischen Einheiten, wie z.B. mm oder Grad, verarbeitet. (Siehe auch Funktionsbaustein MC_TouchProbe TcMc.lib). | Einheit: Inkremente [INC] |
nStatus1 | Optionale Statusinformationen. Z. B. Teilnehmer im Datenaustausch, Encoder Fehler, Kommunikation zum Positions-Latch oder Registerkommunikation. | Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nStatus2 | Zusätzliche optionale Statusinformationen. Z. B. Kommunikation zum Positions-Latch, Kommunikation Encoder-Reset, Kommunikation zum Lesen einer Absolut-Position | Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nStatus3 | reserviert |
|
nStatus4 | Optionaler feldbusabhängiger IO-Status wie WcState (Working Counter) bei EtherCAT oder CdlState bei Beckhoff Lightbus. | Bedeutung: |
nInData3 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nInData4 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nInData5 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nInData6 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nStatus5 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nStatus6 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nStatus7 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nStatus8 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nDcInputTime | Optional: Wird für die NC-Totzeitkompensation des Encoders verwendet. |
|
Ausgangsdaten des Encoder-Prozessabbildes einer Achse
I/O-Variable | Beschreibung | Anmerkung |
|---|---|---|
nOutData1 | Aktuelle Istposition des Encoders bzw. des Drives in Inkrementen, die die NC direkt von der Eingangsvariable nInData1 auf die Ausgangsvariable nOutData1 kopiert wird. | Einheit: Inkremente [INC] |
nOutData2 | reserviert |
|
nCtrl1 | Optionale Control-Informationen. Z. B. Kommunikation zum Positions-Latch, Kommunikation Encoder Reset, Registerkommunikation | Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nCtrl2 | Zusätzliche optionale Control-Informationen. Z. B. Kommunikation zum Positions-Latch, Kommunikation Encoder-Reset, Kommunikation zum Lesen einer Absolut-Position | Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nCtrl3 | reserviert |
|
nCtrl4 | reserviert |
|
nOutData3 | reserviert |
|
nOutData4 | reserviert |
|
nOutData5 | reserviert |
|
nOutData6 | reserviert |
|
nCtrl5 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nCtrl6 | Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Encoders oder Antriebs. |
nCtrl7 | reserviert |
|
nCtrl8 | reserviert |
|
Drive-Prozessabbild einer Achse
Über das Drive-Prozessabbild werden unterschiedliche Antriebs-Hardware oder auch entsprechende Busklemmen (+/-10V, PWM etc.) angebunden. Soweit diese Hardware direkt vom System unterstützt wird, ist keine manuelle Konfiguration notwendig.
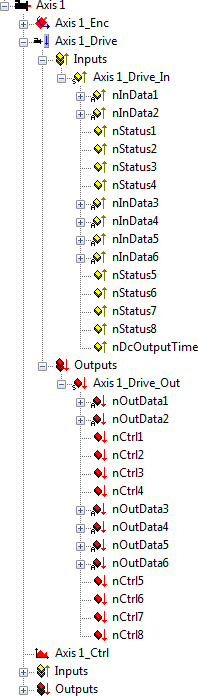
Eingangsdaten des Drive-Prozessabbildes einer Achse
I/O-Variable | Beschreibung | Anmerkung |
|---|---|---|
nInData1 | Optionaler Schleppfehler (Lageregelabweichung, d. h. Sollposition minus Istposition) des IO Drives in Inkrementen. Ausschließlich für die Betriebsart Cyclic Position Mode (z. B. für EtherCAT, SERCOS, CANopen). Diese Größe wird von der NC entsprechend aufbereitet und mathematisch als „externer“ Schleppabstand in physikalischen Einheiten (z. B. in mm oder Grad) verarbeitet. Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Antriebs (z. B. von SERCOS und CANopen unterstützt). |
nInData2 | reserviert |
|
nStatus1 | Optionale Status-Informationen. Z. B. Drive-Fehler, Drive Enabled/Disabled, Kommunikation Antriebs-State-Machine (z.B. EtherCAT, SERCOS, CANopen, Profibus), Registerkommunikation. | Diese Information ist abhängig vom Typ des Antriebs. |
nStatus2 | Zusätzliche optionale Status-Informationen. Z. B. Drive-Fehler, Drive Enabled/Disabled, Kommunikation Antriebs-State-Machine (z.B. EtherCAT, SERCOS, CANopen, Profibus), Registerkommunikation. | Diese Information ist abhängig vom Typ des Antriebs. |
nStatus3 | reserviert |
|
nStatus4 | Optionaler feldbusabhängiger IO-Status wie WcState (Working Counter) bei EtherCAT oder CdlState bei Beckhoff Lightbus. | Bedeutung: |
nInData3 | Optionaler Drehmoment/Kraft-Istwert des IO Drives in Inkrementen. Diese Größe wird von der NC entsprechend aufbereitet und mathematisch als „ActTorque“ in physikalischen Einheiten (z. B. % oder A) verarbeitet. Verbunden (Mapping) mit
| Diese Information ist abhängig vom Typ des Antriebs (z.B. von SERCOS und CANopen unterstützt). |
nInData4 | reserviert |
|
nInData5 | reserviert |
|
nInData6 | reserviert |
|
nStatus5 | reserviert |
|
nStatus6 | reserviert |
|
nStatus7 | reserviert |
|
nStatus8 | reserviert |
|
nDcOutputTime | Optional: Wird für die NC-Totzeitkompensation des Drives verwendet. |
|
Ausgangsdaten des Drive-Prozessabbildes einer Achse
I/O-Variable | Beschreibung | Anmerkung |
|---|---|---|
nOutData1 | Aktuelle Sollgeschwindigkeit oder aktuelle Sollposition in Inkrementen. Die Sollgeschwindigkeit bzw. die Sollposition der NC in physikalischen Einheiten, wie z. B. mm oder Grad, wird von der NC mathematisch in einen Inkrementalwert zurückgerechnet und zum Antrieb übertragen. Hierbei werden Überläufe des Inkrementalwertes in der Sollposition von der NC berücksichtigt. Je nach Drive-Typ wird eine Normierung der Sollgeschwindigkeit bzw. der Sollposition in Inkrementen vorgenommen. Wenn der Drive-Typ Universal-Drive gewählt wurde, enthält nOutData1 die Gesamtgeschwindigkeit (inkl. Lageregelanteil) mit Vorzeichen. | Diese Information ist abhängig vom Typ des Antriebs |
nOutData2 | Aktuelle Sollgeschwindigkeit oder aktuelle Sollposition in Inkrementen. Die Sollgeschwindigkeit bzw. die Sollposition der NC in physikalischen Einheiten, wie z.B. mm oder Grad, wird von der NC mathematisch in einen Inkrementalwert zurückgerechnet und zum Antrieb übertragen. Hierbei werden Überläufe des Inkrementalwertes in der Sollposition von der NC berücksichtigt. Je nach Drive-Typ wird eine Normierung der Sollgeschwindigkeit bzw. der Sollposition in Inkrementen vorgenommen. Wenn der Drive-Typ Universal-Drive gewählt wurde, enthält nOutData2 den Betrag der Gesamtgeschwindigkeit (inkl. Lageregelanteil, ohne Vorzeichen). | Diese Information ist abhängig vom Typ des Antriebs |
nCtrl1 | Optionale Control-Information: Z. B.: Drive-Reset, Drive Enable/Disable, Kommunikation Antriebs-State-Machine (z. B. EtherCAT, SERCOS, CANopen, Profibus), Registerkommunikation. | Diese Information ist abhängig vom Typ des Antriebs |
nCtrl2 | Zusätzliche optionale Control-Information: Digitale Richtungsausgabe der Sollwertgenerierung (entspricht dem Vorzeichen der Sollgeschwindigkeit, also ohne Lageregler) Digital Outputs Setpoint Generator: | Diese Information ist abhängig vom Typ des Antriebs (Ausnahme AX2xxx B200 und B900) |
nCtrl3 | Zusätzliche optionale Control-Information: Digitale Richtungsausgabe bzw. Fahrstufen der Gesamtausgabe (Summe aus Sollwertgenerierung und Lageregler) Digital Outputs (Setpoint Generator + Position Controller): |
|
nCtrl4 | reserviert |
|
nOutData3 | Aktuelle Sollbeschleunigung (2te zeitliche Ableitung der Sollposition) in Inkrementen. Optional kann es auch das aktuelle Soll-Moment in Inkrementen enthalten (z. B. von einer erweiterten Transformation mit dynamischem Modell). Die Sollbeschleunigung und das Soll-Moment können entweder jeweils einzeln oder auch als Summe der Einzelgrößen vorliegen (je nach Parametrierung der Ausgabeskalierungen). Die Ausgabegröße ist vorzeichenbehaftet. | Diese Information ist abhängig vom Typ des Antriebs |
nOutData4 | reserviert |
|
nOutData5 | reserviert |
|
nOutData6 | reserviert |
|
nCtrl5 | reserviert |
|
nCtrl6 | reserviert |
|
nCtrl7 | reserviert |
|
nCtrl8 | reserviert |
|