2D-Kinematik Typ 1
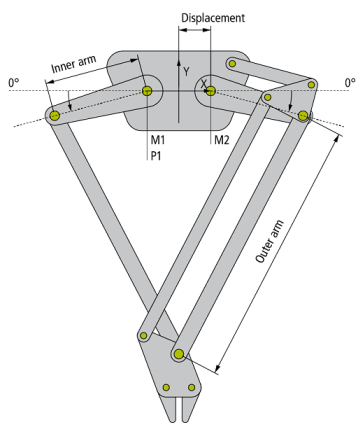
Die 2D-Kinematik Typ 1 ist wie oben im Schema gezeigt aufgebaut.
Alle Motorachsen sind in Grad skaliert und 0° ist wie im Schema gezeigt definiert, wobei der Pfeil die positive Richtung anzeigt.
Parameter für die Kinematik
|
Parameter |
Beschreibung |
Einheit |
|---|---|---|
|
InnerArmLength |
Länge von Drehpunkt zu Drehpunkt des inneren Arms. |
mm |
|
OuterArmLength |
Länge von Drehpunkt zu Drehpunkt des äußeren Arms. |
mm |
|
Displacement |
Länge vom Mittelpunkt der Grundplatte bis zu den virtuellen Drehachsen des inneren Arms. |
mm |
|
MCS2WCS OID |
Objekt-ID einer statischen Transformation, die die Position des MCS im Basiskoordinatensystem (normalerweise das Werkstückkoordinatensystem, WCS) definiert. |
|
Parameter für das dynamische Modell
|
Parameter |
Beschreibung |
Einheit |
|---|---|---|
|
InnerArmMass |
Gesamtmasse des inneren Arms |
kg |
|
InnerArmMomentOfInertia |
Trägheitsmoment des inneren Arms in Bezug zum Drehpunkt P1, der mit dem Motor verbunden ist. |
kg mm^2 |
|
OuterArmMass |
Masse des äußeren Arms. Die Gelenkmasse kann optional als eigener Parameter beschrieben werden. |
kg |
|
FirstLinkMass |
Masse des Gelenks, das den inneren und äußeren Arm verbindet. Kann verwendet werden, wenn die Gelenkmasse nicht bereits in den äußeren und inneren Armen enthalten ist. |
kg |
|
SecondLinkMass |
siehe FirstLinkMass |
kg |
|
TcpMass |
Masse des Tool Center Point, einschließlich Greiferplatte und Greifer. Die Nutzlast wird normalerweise mit Hilfe eines getrennten Parameters beschrieben. |
kg |
|
FirstDriveTorqueOID |
Objekt-ID des ersten Antriebsdrehmoments |
|
|
SecondDriveTorqueOID |
Objekt-ID des zweiten Antriebsdrehmoments |
|
|
GravityOrientationOID |
Objekt-ID einer statischen Transformation, die die Montagerichtung beschreibt. Dieser Parameter wird dann verwendet, wenn der Greifer nicht zum Boden zeigt. Die Z-Achse der statischen Transformation definiert die Schwerkraftrichtung. Wenn der Roboter wie auf der Abbildung montiert ist, kann diese OID gleich null sein. |
|
Erforderliches Produkt-Level:
Level 2