H-Bot
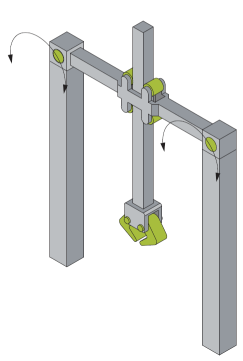
Der H-Bot ist wie oben im Schema gezeigt aufgebaut.
Die Motorachsen müssen in mm skaliert werden und entsprechen der Seillänge an jeder Seite des TCP. Für die Berechnung der Transformation reichen die relativen Seillängen. Die absoluten Seillängen sind nicht erforderlich.
Der Ursprungspunkt des Maschinenkoordinatensystem ist durch den Punkt definiert, für den die Positionen der beiden Motoren gleich null sind.
Parameter für die Kinematik
|
Parameter |
Beschreibung |
Einheit |
|---|---|---|
|
MCS2WCS OID |
Objekt-ID einer statischen Transformation, die die Position des MCS im Basiskoordinatensystem (normalerweise das Werkstückkoordinatensystem, WCS) definiert. |
|
Parameter für das dynamische Modell
|
Parameter |
Beschreibung |
Einheit |
|---|---|---|
|
FirstDriveTorqueOID |
Objekt-ID des ersten Antriebsdrehmoments |
|
|
SecondDriveTorqueOID |
Objekt-ID des zweiten Antriebsdrehmoments |
|
|
GravityOrientationOID |
Objekt-ID einer statischen Transformation, die die Montagerichtung beschreibt. Dieser Parameter wird dann verwendet, wenn der Greifer nicht zum Boden zeigt. Die Z-Achse der statischen Transformation definiert die Schwerkraftrichtung. Wenn der Roboter wie auf der Abbildung montiert ist, kann diese OID gleich null sein. |
|