MC_MoveSuperImposed
Mit MC_MoveSuperImposed wird eine relative Bewegung beauftragt, zusätzlich zu einer bereits aktiven Bewegung. Die aktive Bewegung wird nicht unterbrochen, sondern mit der beauftragten überlagert. Die Bewegung wird immer ruckbegrenzt mit dem in "Jerk" eingestellten konstanten Ruck ausgeführt. Der Wert gilt sowohl für das Beschleunigen mit "Acceleration", als auch für das Bremsen mit "Deceleration".
Da sich bei der überlagerten Interpolation auch die Beschleunigungen überlagern, ist durch entsprechende Achsparametrierung sicherzustellen, dass die Achse nicht dynamisch überfordert wird.
NC-Befehl:
<Achsname>[ MC_MoveSuperImposedDistance=<expr> VelocityDiff=<expr>
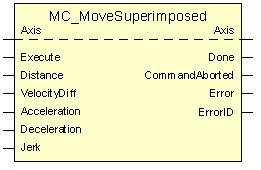
Acceleration=<expr> Deceleration=<expr> Jerk=<expr>]Blockdiagramm des Funktionsbausteins in PLCopen:
Eingangspin | Einheit |
|
Distance | [0,1µm or 10-4 °] | |
VelocityDiff | [1µm/s or 10-3 °/s] | |
Acceleration | [1mm/s2 or 1°/s2] | |
Deceleration | [1mm/s2 or 1°/s2] | |
Jerk | [1m/s3 or 1000°/s3] |
Programmierbeispiel
S[MC_MoveSuperImposed Distance=321 VelocityDiff=783 Acceleration=811 Deceleration=922 Jerk=432]