Definition der Zieltangente
#SET ASPLINE ZIELTANG {<Achsname><expr>} (modal)<Achsname> <expr> Komponenten des Tangentenvektors
Definition der Zieltangente; analog zur Definition der Starttangente.
Programmierbeispiel
N10 G01 X20 Y0 F1000 (wird durch nachf. G151 zum ersten)
(Stützpunkt der Spline-Kurve)
N20 #SET ASPLINE MODE[3,1] (Übergangsart mit expliziter Vorgabe)
(derStarttangente und autom. Bestimmung)
(der Zieltangente)
N30 #SET ASPLINE STARTTANG X1 Y1 Z0 (Vorgabe der Starttangente)
N40 G151 (Anwahl der Spline-Interpolation)
N50 G01 X40 Y20
N60 X60
N70 Y0
N80 X80
N90 Y10 (wird durch nachf. G150 zum letzten)
(Stützpunkt der Spline-Kurve)
N100 G150 (Abwahl der Spline Interpolation)
N110 X70
N120 M30 Das folgende NC-Programm liefert dasselbe Resultat, verwendet jedoch für die An- und Abwahl der Spline-Interpolation die zweite Variante.
N10 G01 X20 Y0 F1000
N20 #SET ASPLINE MODE[3,1] (Übergangsart mit expliziter Vorgabe)
(der Starttangente und autom.)
(Bestimmung der Zieltangente)
N30 #SET ASPLINE STARTTANG X1 Y1 Z0 (Vorgabe der Starttangente)
N40 G151 G01 X40 Y20 (Anwahl der Spline-Interpolation)
N50 X60
N60 Y0
N70 X80
N80 Y10
N90 G150 X70 (Abwahl der Spline-Interpolation)
N100 M30 Das Programm erzeugt folgende Kontur:
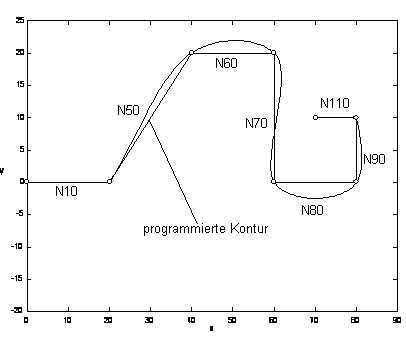 Abb.75: Bahnverlauf des Beispielprogramms (Nummerierung bezieht sich auf das erste Programm-Beispiel
Abb.75: Bahnverlauf des Beispielprogramms (Nummerierung bezieht sich auf das erste Programm-BeispielEs ist deutlich zu erkennen, dass der dem Satz N50 entsprechende Kurvenabschnitt an seinem Beginn (der dem Beginn der Spline-Kurve entspricht) die programmierte Steigung 1 aufweist. Die Steigung am Ende des Splines (Ende von Satz N90) ergibt sich automatisch.
 | Werden Zirkularsätze (G02 bzw. G03) eingefügt, so wird die Spline-Kurve vor dem Zirkularsatz unterbrochen und mit dem Eintreffen des nächsten Linearsatzes automatisch eine neue Spline-Kurve begonnen. Die Übergänge in und vom Zirkularsatz erfolgen tangential. |