Dynamisch optimiertes Überschleifen (6.Art)
Die Überschleifarten 1-5 legen die Überschleifkurve durch ein richtungs- und krümmungsstetige Verbindung zweier Bewegungssätze fest. Diese Überschleifkurve führt auf die Achsen bezogen evtl. zu einer Schwankung der Beschleunigung.
Bei der achsbezogenen Betrachtung der möglichen Dynamikdaten (Beschleunigung, Ruck) wird die Überschleifkurve unter einer möglichst gleichmäßigen Beschleunigung (ruckminimal) der beteiligten Achsen bestimmt. Unter Ausnutzung einer maximalen Beschleunigung der Achsen wird zusätzlich die Zeitdauer des Überschleifvorgangs reduziert.
Die Parametrierung gemäß 6.Art erfolgt mit:
#CONTOUR MODE [ DIST_SOFT [PATH_DIST<expr>] [TRACK_DIST<expr>]
[ACC_MAX<expr>] [ACC_MIN<expr>] [RAMP_TIME<expr>]
[DIST_WEIGTH<expr>] ]DIST_SOFT Dynamisch optimiertes Überschleifen
PATH_DIST<expr> Eckabstand zum Vor- und Nachsatz (symmetrisch) in mm bzw. Grad, ab dem von der Originalkontur abgewichen werden darf. Die Angabe bezieht sich auf den Fahrweg der Vorschubachsen.
Defaultwert : 1 mm bzw. 1 °
Überwachung aus: -1 mm bzw. -1 Grad
TRACK_DIST<expr> Eckabstand zum Vor- und Nachsatz in mm bzw. Grad, ab dem die Nicht-Vorschubachsen (Mitschleppachsen) von der Originalkontur abweichen dürfen.
Defaultwert: Wert wird automatisch von PATH_DIST übernommen, solange dieser noch nicht (seit Programmstart) explizit angegeben wurde.
Überwachung aus: -1 mm bzw. -1 Grad
ACC_MAX<expr> Prozentualer Anteil [0; 100] der maximalen Achsbeschleunigung (Maschinendatum), die durch den Konturverlauf genutzt werden darf.
Defaultwert : 100 %
ACC_MIN<expr> Prozentualer Anteil [0; 100] der maximalen Achsbeschleunigung (Maschinendatum), die durch den Konturverlauf genutzt werden soll. Wird hierbei der vorgegebene Eckenabstand (s. SYM_SIST) nicht eingehalten, so wird die Beschleunigung bis zu Maximalwert (ACC_MAX) erhöht.
Defaultwert : 50 %
RAMP_TIME<expr> Prozentuale Gewichtung der Rampenzeit [ 0; 10000].
Defaultwert : 100 %
DIST_WEIGHT<expr> Prozentuale Gewichtung der Eckenabstände im Verhältnis zum vorhergehenden / nachfolgenden Satz [ 0; 100].
Defaultwert : 0 %
Einschränkungen:
- Wird beim Überschleifen ein Zirkularsatz verwendet, so wird die Überschleifkurve auf die konventionelle Art berechnet (ohne dynamische Optimierung, gemäß 3.Art).
- Für die Berechnung wird nur eine Rampenzeit (Maximalwert der vier individuellen Rampenzeiten) verwendet.
- Keine Behandlung von kinematischen Transformationen. In diesem Fall wird ebenso auf die konventionelle Art umgeschaltet (gemäß 3.Art).
Die Gewichtung der Eckenabstände in Abhängigkeit des vorhergehenden bzw. nachfolgenden Satzes durch den Parameter DIST_WEIGHT ergibt in vielen Fällen eine bessere Ausnutzung der zur Verfügung stehenden Satzlänge.
Beim Verfahren des achsbezogenen Überschleifens sind die Eckenabstände des Vor- und Nachsatzes grundsätzlich gleich (symmetrisch). Werden die maximalen Eckenabstände zusätzlich auf den halben Satzfahrweg begrenzt, so ergibt sich bei längeren Fahrwegen aufgrund eines vorhergehenden/ nachfolgenden kurzen Fahrwegs ein geringerer Verschleifbereich und somit eine kleinere Überschleifgeschwindigkeit.
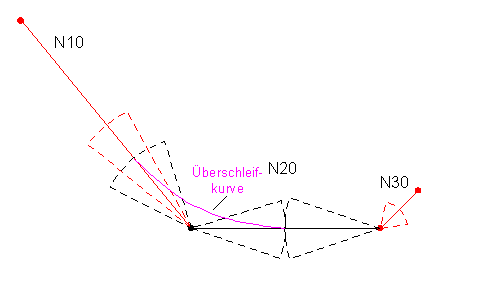 Abb.45: Maximaler Eckenabstand des Satzes N20 unabhängig von den Satzlängen von N10 und N20 (DIST_WEIGHT = 0 %)
Abb.45: Maximaler Eckenabstand des Satzes N20 unabhängig von den Satzlängen von N10 und N20 (DIST_WEIGHT = 0 %)Werden die Länge des vorhergehenden und nachfolgenden Satzes für die Ermittlung der maximalen Eckenabstände mitberücksichtigt, so kann der Verschleifbereich erhöht werden.
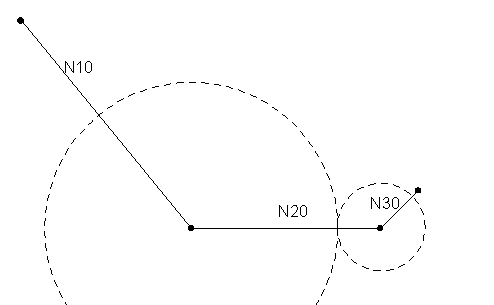 Abb.46: Maximaler Eckenabstand des Satzes N20 unterteilt im Verhältnis der Satzlängen von N10 und N30 (DIST_WEIGHT = 100 %)
Abb.46: Maximaler Eckenabstand des Satzes N20 unterteilt im Verhältnis der Satzlängen von N10 und N30 (DIST_WEIGHT = 100 %)Programmierbeispiel
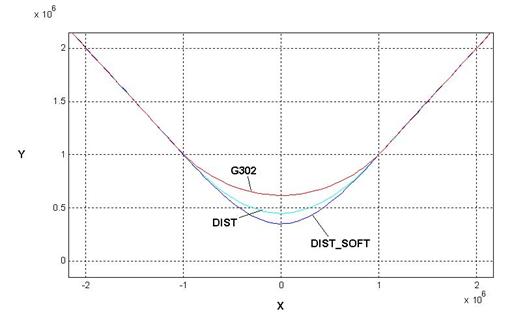
Vergleich des Überschleifens einer 90° Grad-Ecke mit den Methoden:
- Explizites Einfügen eines Radius (G302):
P1 = 150 Eckenabstand
P4 = 2000 (Anfahrposition
N10 X-P4 YP4
N20 X0 Y0
N25 G302 IP1
N30 XP4 YP4
N40 M30- Konventionelles Überschleifen mit Angabe des Eckenabstandes (DIST):
#SET SLOPE PROFIL[1]
P1 = 150 (Eckenabstand
P4 = 2000 (Anfahrposition
#CONTOUR MODE [DIST PRE_DIST=P1 POST_DIST=P1]
N10 X-P4 YP4
N20 X0 Y0 G61
N30 XP4 YP4
N40 M30- Dynamisch optimiertes Überschleifen (DIST_SOFT):
#SET SLOPEPROFIL[1]
P1 = 150 (Eckenabstand
P4 = 2000 (Anfahrposition
#CONTOUR MODE [DIST_SOFT PATH_DIST=P1 ACC_MAX=100 ACC_MIN=50 RAMP_TIME=100]
N10 X-P4 YP4
N20 X0 Y0 G61
N30 XP4 YP4
N40 M30Vergleich der drei Arten in der Position der Überschleifkurve: