Zwischenpunkt-Überschleifen (5.Art)
Der Anwender gibt hier sowohl die Eckabstände als auch einen Zwischenpunkt PZ, an den die beiden Polynomkurven angrenzen, vor (Expertenmodus). Mit diesem Verfahren ist es z.B. möglich, durch Vorgabe des Eckabstandes Null die programmierte Kontur beizubehalten und die Dynamik dennoch voll auszunutzen. D.h. die Eckabstände müssen hier nicht unbedingt symmetrisch sein.
Die Parametrierung gemäß 5.Art erfolgt mit:
#CONTOUR MODE [ POS [PRE_DIST<expr>] [POST_DIST<expr>]
[<1.Hauptachsname><expr>] [<2.Hauptachsname><expr>]
[<3.Hauptachsname><expr>] [<action>] [CHECK_JERK<expr>]
[CONST_VEL<expr>]]POS Überschleifen mit Angabe des Zwischenpunktes
PRE_DIST<expr> Eckabstand in mm, ab dem von der Originalkontur abgewichen wird. Die Angabe von 0 mm ist hier möglich.
Defaultwert: 1 mm
POST_DIST<expr> Eckabstand in mm, bei dem auf die Originalkontur zurückgekehrt wird. Die Angabe von 0 mm ist hier möglich.
Defaultwert: 1 mm
<1.Hauptachsname><expr> Position des Zwischenpunkts in mm in der ersten Hauptachse
<2.Hauptachsname><expr>Position des Zwischenpunkts in mm in der zweiten Hauptachse
<3.Hauptachsname><expr>Position des Zwischenpunkts in mm in der dritten Hauptachse
<action> Ausführungszeitpunkt zusätzlicher Aktionen (M/H):
Kennungen | Bedeutung |
|---|---|
PRE_ACTION | Aktionen vor der Überschleifkurve. |
INTER_ACTION | Aktionen während der Überschleifkurve (Default). |
POST_ACTION | Aktionen nach der Überschleifkurve. |
CHECK_JERK<expr> Überwachung des Rucks, hervorgerufen durch die Krümmung des Polynoms (vgl. [1]-41).
Wert | Bedeutung |
|---|---|
0 | Ohne Rucküberwachung (Default). |
1 | Rucküberwachung basierend auf der geom. Rampenzeit [2]-16. Evtl. wird hierdurch die Bahngeschwindigkeit reduziert. |
2 | Rucküberwachung basierend auf den Rampenzeiten [2]-21..24 des nichtlinearen Geschwindigkeitsprofils. |
CONST_VEL<expr> Konstante Bahngeschwindigkeit im Überschleifbereich.
Programmierbeispiel
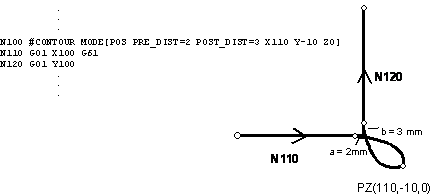 Abb.44: Zwischenpunkt-Überschleifen
Abb.44: Zwischenpunkt-Überschleifen