Abhängigkeiten von der Art des Referenzierungsverfahrens
Wie eingangs erwähnt stehen unterschiedliche Referenzierungsverfahren zur Verfügung. Die Auswahl eines Verfahren erfolgt durch Vorgabe in den jeweiligen Achslisten (achsmdsX.lis) über das Element kenngr.homing.homing_type. Dort wird über eine definierte Zeichenkette das jeweilige Verfahren ausgewählt. Die zur Verfügung stehenden Verfahren sind der folgenden Tabelle zu entnehmen:
Methode | Schlüsselwort |
|---|---|
Fahren auf Festanschlag, NC-geführt | TORQ |
Kompatibilitätsmodus | NONE |
Verhalten der Achse bei Referenzierungstyp NONE
- Ist die Beauftragung ausgeführt, ist für die Achse der Wert als Referenzposition übernommen worden, der im Element „getriebe[i].pos_refpkt“ in der Achsliste (achsmdsX.lis) hinterlegt ist.
- Das Verhalten der Achse während der Beauftragung hängt vom parametrierten Antriebstyp ab. Ist für die Achse der Antriebstyp DSE (siehe kenngr.antr_typ) parametriert, wird sich die Achse bei einer Beauftragung des FB nicht bewegen. Es wird unmittelbar die parametrierte Referenzposition übernommen und der Ausgang „Done“ auf TRUE gesetzt.
Ist für die Achse der Antriebstyp Simulation (siehe kenngr.antr_typ) parametriert, wird sich die Achse bewegen und nach einem kurzen Weg die parametrierte Referenzposition übernehmen.
Verhalten der Achse bei Referenzierungstyp TORQ
- Ist für die Achse der Antriebstyp DSE parametriert, wird sich die Achse bei einer Beauftragung des FB bewegen.
- Bei Anwendung des Referenzierungstyp TORQ sind weitere Parameter in der Achsliste (achsmdsX.lis) mit Werten zu belegen. Es gibt allgemeine Parametern, die sich auf den Referenzierungsvorgang als solchen beziehen. Sie sind in der Achsliste mit dem Präfix kenngr.homing. versehen.
Name | Dimension | Wertebereich | Beschreibung |
|---|---|---|---|
torq_min_distance | 0,1 μm | < torq_max_distance | Mindestweg bis zur Detektierung der Referenzposition |
torq_max_distance | 0,1 μm | 0 ... MAX_SGN23 | Maximalweg bis zur Detektierung der Referenzposition |
torq_homing_dir |
| [POSITIVE | NEGATIVE] | Richtung der Referenzpunktfahrt |
torq_detect_velocity_limit | 0,1 % | 0 ... 1000 | Geschwindigkeitsgrenzwert zur Detektierung der Referenzposition |
torq_retraction_distance | 0,1 μm | MAX_SGN32 | Rückzugsweg nach erkennen der Referenzposition |
torq_homing_position | 0,1 μm | MAX_SGN32 | Referenzposition |
torq_detect_time | μs | MAX_UNS32 | Mindestzeit, die das Grenzmoment überschritten sein muss, damit die Referenzposition erkannt wird. |
Allgemeine Parameter für das Referenzieren auf Festanschlag
Die getriebestufen-abhängigen Parameter sind mit dem Präfix getriebe[].homing.X versehen. Wobei für X eine Ordnungszahl für die jeweilige Getriebestufe eingetragen ist.
Name | Dimension | Wertebereich | Beschreibung |
|---|---|---|---|
torq_move_acceleration | mm/s2 | <= a_max | Beschleunigung |
torq_move_velocity | μm/s | <= vb_max | Geschwindigkeit für Achsbewegung |
torq_move_torque_limit | 0,1 % | 0 ... 1000 | Prozentualer Drehmomentgrenzwert für Bewegung. |
torq_detect_torque_limit | 0,1 % | 0 ... 1000 | Grenzmoment für die Detektion der stehenden Achse. Prozentualer Wert bezogen auf torq_move_torque_limit. |
Getriebestufen-spezifische Parameter für das Referenzieren auf Festanschlag
Nachstehende Grafik zeigt, auf welche Weise die aufgeführten Parameter Einfluss beim Fahren auf Festanschlag besitzen.
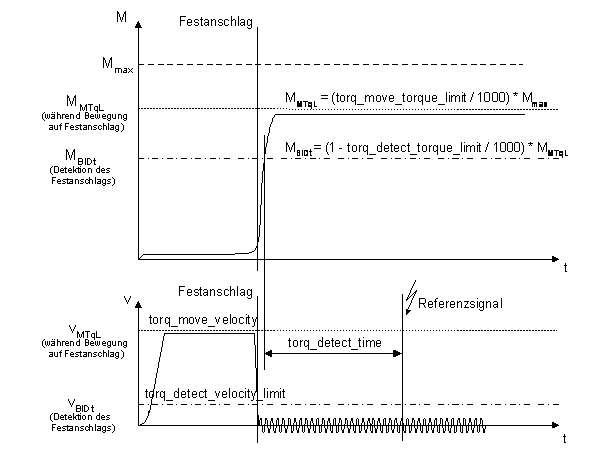 Abb.19: Einfluss der Parameter beim Fahren auf Festanschlag
Abb.19: Einfluss der Parameter beim Fahren auf Festanschlag