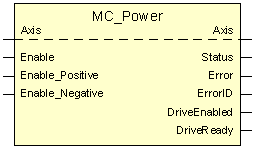
MC_Power
Der FB MC_Power schaltet die Leistung des Antriebs der durch AXIS_REF definierten Achse ein oder aus. Er ist der Gruppe der administrativen FB zugeordnet.
Blockdiagramm
Parameter des FB
VAR_IN_OUT | |||
| Axis | AXIS_REF | Achsreferenz |
VAR_INPUT | |||
| Enable | BOOL | Muss den Wert TRUE besitzen, sonst wird keine Leistung zugeschaltet. |
| Enable_Positive | BOOL | Muss den Wert TRUE besitzen, sonst wird keine Leistung zugeschaltet. Derzeit wird die Freigabe nur der positiven Verfahrrichtung nicht unterstützt |
| Enable_Negative | BOOL | Muss den Wert TRUE besitzen, sonst wird keine Leistung zugeschaltet. Derzeit wird die Freigabe nur der negativen Verfahrrichtung nicht unterstützt |
VAR_OUTPUT | |||
| Status | BOOL | Der Wert TRUE zeigt an, dass der Antrieb drehmomentbehaftet ist und sich in Regelung befindet.. |
| Error | BOOL | Zeigt an, ob innerhalb des FB ein Fehler aufgetreten ist. |
| ErrorID | WORD | Fehlerkennung |
| DriveEnabled | BOOL | Der Wert TRUE zeigt an, ob der Antrieb bereit zur Leistungsfreigabe ist. |
| DriveReady | BOOL | Der Wert TRUE bedeutet, dass sich der Antrieb in Regelung befindet. |
Verhalten des FB:
- Die Leistung für den Antrieb wird nur dann zugeschaltet, wenn sämtliche 3 Eingänge den Wert TRUE besitzen.
- Unabhängig vom Zustand der Achse, lässt sich dieser FB beauftragen und der Auftrag an den Motion Controller absetzen.
- Falls ein Fehler in anderen Achsen vorliegt, reagiert der FB MC_Power mit einem Achsfehler („ErrorID“ = 40001 und MC_ReadAxisError.AxisErrorID = 294039)
- Das Verhalten der Achse hängt vom parametrierten Antriebstyp ab. Ist für die Achse der Antriebstyp Simulation (kenngr.antr_typ 4) parametriert, so wird auch der Output „Status“ simuliert.
- Ist für die Achse der Antriebstyp DSE (siehe kenngr.antr_typ) parametriert und werden Motoren mit integrierter Bremse verwendet, so beinhaltet der FB zusätzlich auch das öffnen der Bremsen.
Die Einstellung der Bremsverzögerungszeiten beim Setzen / Nehmen der Reglerfreigaben mittels dieses FB werden in den Achslisten achsmds[X].lis über folgende Einträge:
antr_digital.typ.dse.brake_open_delay_time
antr_digital.typ.dse.brake_open_time
antr_digital.typ.dse.brake_close_premature_time
parametriert.
Das genaue Verhalten ist den nachfolgenden Timing-Diagrammen zu entnehmen:
Bremse öffnen:
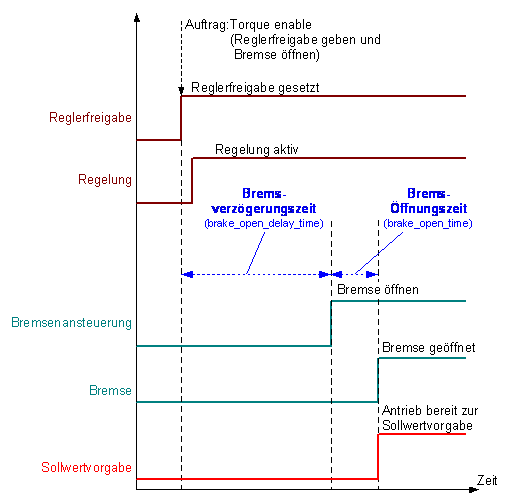 Abb.17: Zeitverhalten beim Öffnen der Bremse
Abb.17: Zeitverhalten beim Öffnen der BremseBremse schließen:
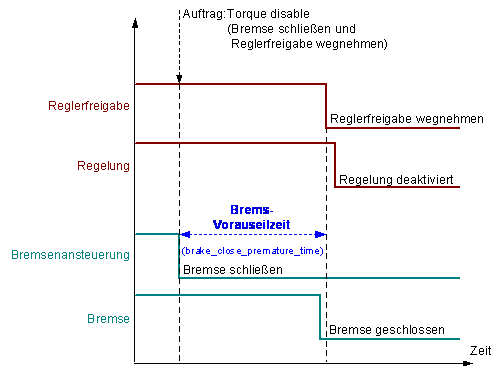 Abb.18: Zeitverhalten beim Schließen der Bremse
Abb.18: Zeitverhalten beim Schließen der Bremse