Berechnung der Polynomkoeffizienten und Interpolation
Die Polynome 5. Grades zur Bestimmung der Slaveposition s in Abhängigkeit der Masterposition t in den Bereichen nicht konstanter Geschwindigkeit sind von der Form

Sie sind bestimmt durch 6 Randbedingungen. In Start- und Endpunkt müssen die Lage s sowie die erste (Geschwindigkeit v) und die zweite Ableitung (Beschleunigung a) mit den benachbarten Intervallen übereinstimmen. Die zweite Ableitung, also die Beschleunigung, soll links und rechts gleich 0 sein. Bild 20 zeigt 3 aufeinander folgende Intervalle, mit Hilfe derer die Berechnung der Polynomkoeffizienten erfolgt.
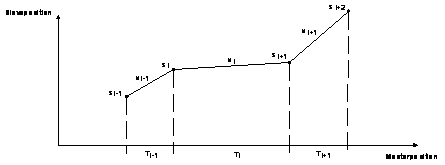 Abb.10: Master-Slave-Intervalle einer Cam-Tabelle
Abb.10: Master-Slave-Intervalle einer Cam-TabelleAls Beispiel wird nachfolgend eine Cam-Tabelle vom Typ POLY5-LINE berechnet und mit Lage, Geschwindigkeit und Beschleunigung in den einzelnen Intervallen dargestellt.
Tablename = poly5line_2 # Tabellen-Name
Table-ID = 402 # Tabellen-ID
Tabletype = 7 # Tabellentyp
Functiontype = 5 # Interpolationstyp, 5 = POLY5-LINE
Lines = 10 # Anzahl der Zeilen
Begintable # Beginn Tabelle
100000 0
200000 400000
400000 1600000
670000 1800000
900000 300000
980000 1700000
1500000 3400000
1800000 2700000
2700000 1700000
3000000 2600000
EndTableIm ersten Diagramm sind die Intervalle mit Polynomen in rot und die Intervalle mit konstanter Geschwindigkeit in blau dargestellt.
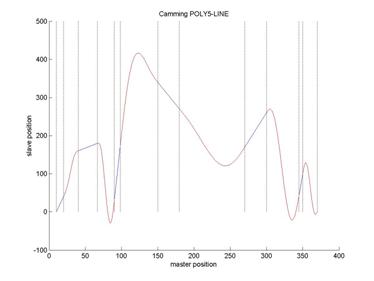
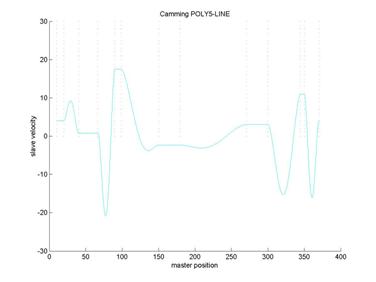
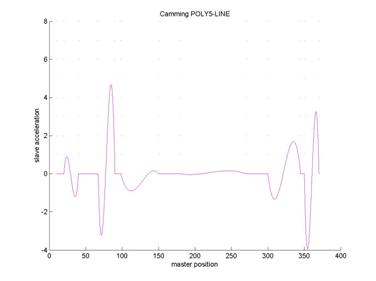 Abb.11: Beispiel für Cam mit POLY5-LINE
Abb.11: Beispiel für Cam mit POLY5-LINE