KIN_TYP_60
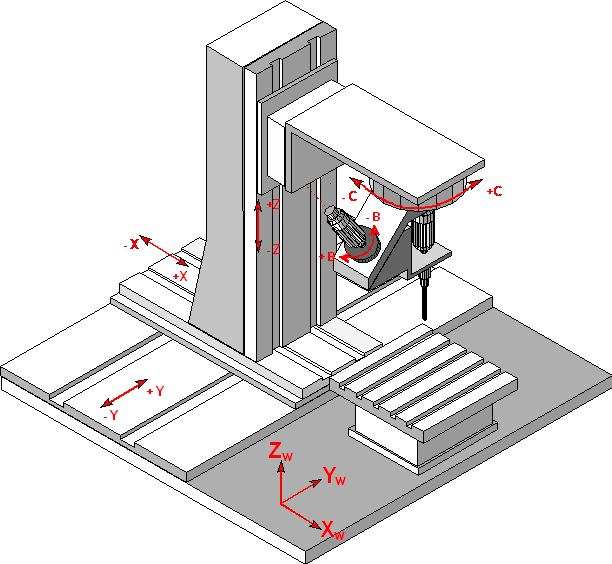
Die Kinematik besteht aus drei translatorischen und zwei rotatorischen NC-Achsen Achsen im Werkzeug. Die B-Achse ist um einen Winkel != 90 Grad um die X-Achse gedreht angeordnet, typischerweise liegt der Winkel zwischen 30 und 60 Grad.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X, Y, Z, C, B | |
Achsindex | 0, 1, 2, 3, 4 | |
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | X, Y, Z,C,B | - |
Versatzdaten der Kinematik:
HD-Versatz | param[i] | Bedeutung |
|---|---|---|
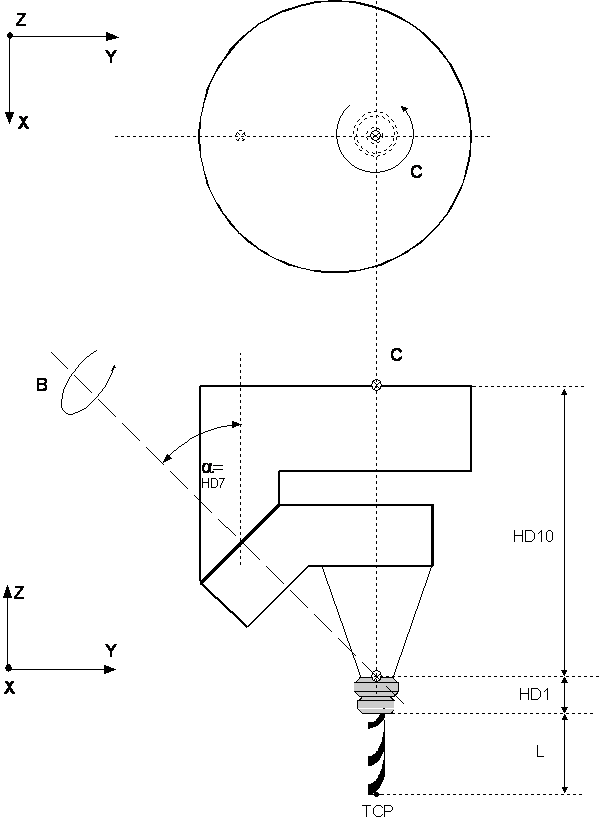
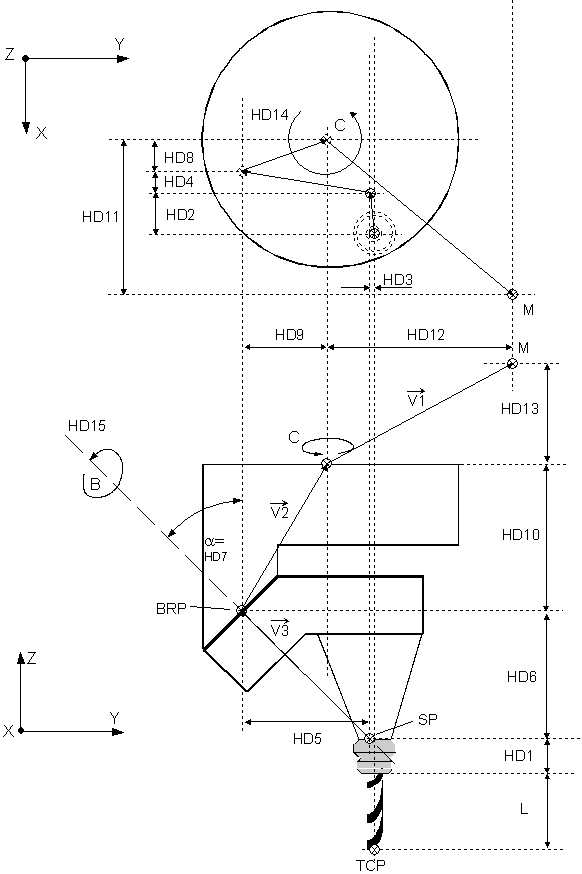
HD1 | 0 | Z- Versatz bis Einspannung WZ |
HD2 | 1 | X- Versatz bis Einspannung WZ |
HD3 | 2 | Y- Versatz bis Einspannung WZ |
HD4 | 3 | X- Versatz Kompensationspunkt (SP) bis B-Achse |
HD5 | 4 | Y- Versatz Kompensationspunkt (SP) bis B-Achse |
HD6 | 5 | Z- Versatz Kompensationspunkt (SP) bis B-Achse |
HD7 | 6 | Winkel zwischen B-Achse und Z Achse |
HD8 | 7 | X- Versatz B-Achse bis C-Achse |
HD9 | 8 | Y- Versatz B-Achse bis C-Achse |
HD10 | 9 | Z- Versatz B-Achse bis C-Achse |
HD11 | 10 | X- Versatz C-Achse bis Maschinenpunkt M |
HD12 | 11 | Y- Versatz C-Achse bis Maschinenpunkt M |
HD13 | 12 | Z- Versatz C-Achse bis Maschinenpunkt M |
HD14 | 13 | Rotatorischer Offset C-Achse |
HD15 | 14 | Rotatorischer Offset B-Achse |
|
|
|
HD21 | 20 | Steuerflag: 0: Transformation der rotatorischen Achsen C und B , Default. 1: Die rotatorischen Achsen C und B sind Maschinenwinkel. |
Im allgemeinen wandert der mit BRP bezeichnete Bezugspunkt in den Bezugspunkt SP d.h. der Vektor V3 ist 0 und der Punkt SP liegt in der Werkzeugachse die sich mit der C- Drehachse deckt. In diesem Fall sind dann nur die Parameter L, HD1, HD7 und HD10 erforderlich.
Die Kinematik kann einen B-Raumwinkel von maximal 2*HD7 umsetzen.
(*) Die rotatorischen Offsets HD14 und HD15 wirken nur auf das interne Kinematikmodell d.h. diese Offsets führen nicht zu einer Neupositionierung des Kardankopfes wie bei einer rotatorischen NPV und Programmierung einer Winkelposition.