KIN_TYP_28
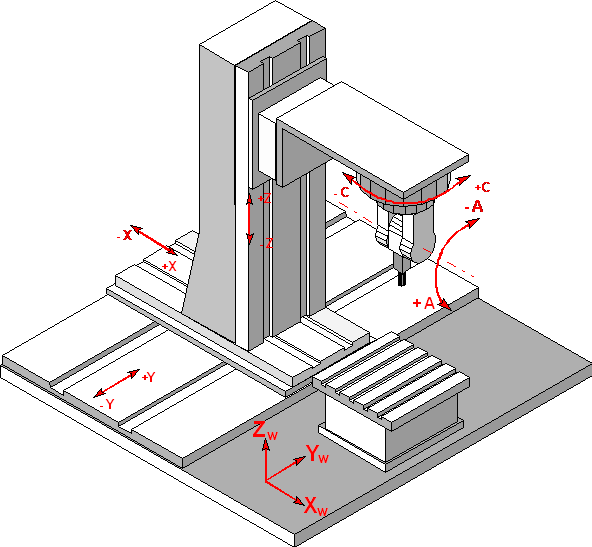
Die Kinematik besteht aus drei translatorischen NC-Achsen und zwei rotatorischen NC-Achsen im Werkzeug. Die physikalische Winkelstellung des Kopfes C, A wird über zwei Achsen mit Getriebekopplung eingestellt.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X, Y, Z, C(C1), A(C2) | |
Achsindex | 0, 1, 2, 3, 4 | |
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | X, Y, Z, C(C1), A(C2) | - |
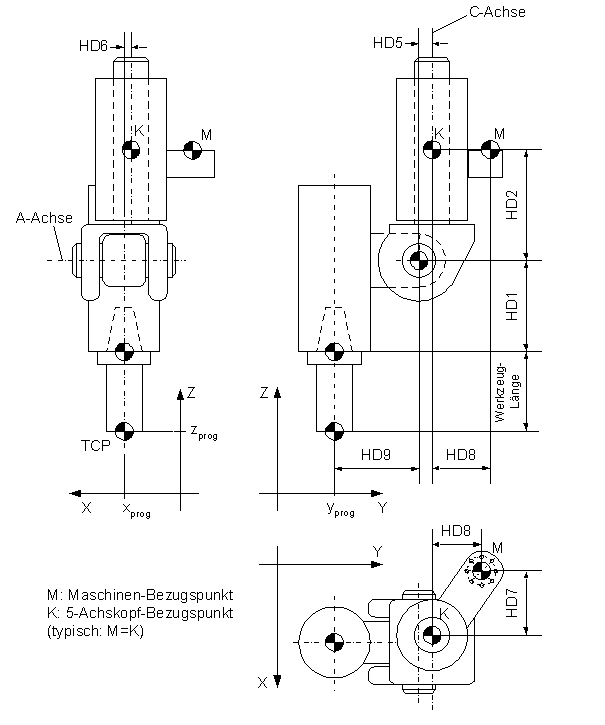
Versatzdaten der Kinematik:
HD-Versatz | param[i] | Bedeutung |
|---|---|---|
HD1 | 0 | Z Achsversatz von Werkzeugeinspannpunkt bis Drehpunkt A Achse (Schwenkachse) |
HD2 | 1 | Z Achsversatz Drehachse A zu Werkzeugkopfbezugspunkt |
HD3 | 2 | Rotatorischer Winkelversatz A Achse (Defaultwert 0) |
HD4 | 3 | Rotatorischer Winkelversatz C Achse (Defaultwert 0) |
HD5 | 4 | Y Achsversatz Drehpunkt C Achse |
HD6 | 5 | X Achsversatz Drehpunkt C Achse |
HD7 | 6 | statischer Kopfversatz in X (Defaultwert 0) |
HD8 | 7 | statischer Kopfversatz in Y (Defaultwert 0) |
HD9 | 8 | Y Achsversatz Fräserachse zu Drehpunkt A-Achse |
HD10 | 9 | n. v. |
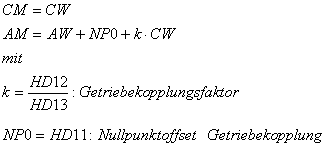
HD11 | 10 | Nullpunktoffset CA Getriebekopplung |
HD12 | 11 | Getriebekopplungsfaktor Zähler |
HD13 | 12 | Getriebekopplungsfaktor Nenner |
HD14 | 13 | VZ Drehachse C |
HD15 | 14 | VZ Drehachse A |
Die Getriebekopplung zwischen C und A ist absolut und wird nach folgenden Gleichungen durchgeführt:
Die Drehachsen des Kopfes müssen entweder als Linearachsen oder als Rotatorachsen mit ausreichend großem Modulobereich eingestellt sein. Die SWE Überwachung im Kanal wirkt auf Antriebspositionen entsprechend den im MDS eingestellten Grenzen.