KIN_TYP_21
Die Kinematik besteht aus 3 translatorischen NC-Achsen und einer rotatorischen NC-Achse im Werkzeug.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X, Y, Z, C (X1, X2, Z, C) | |
Achsindex | 0, 1, 2, 3 | |
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | X,Y, Z, C | - |
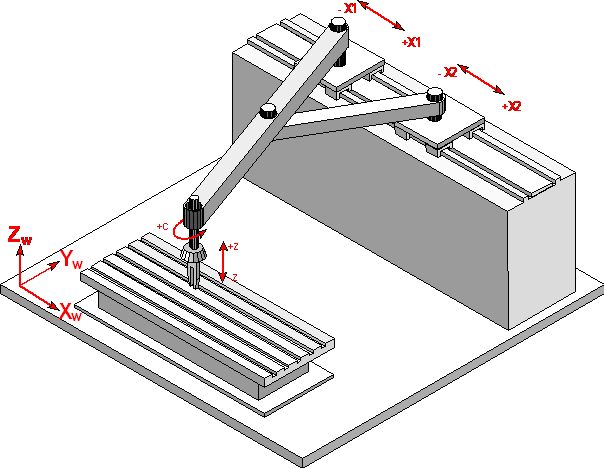
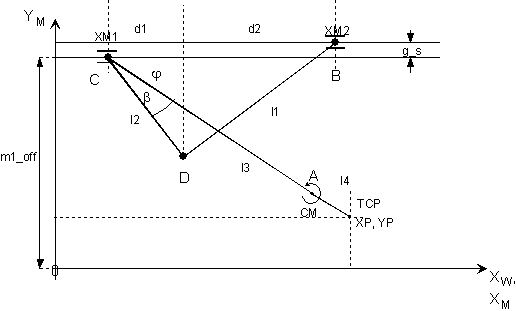
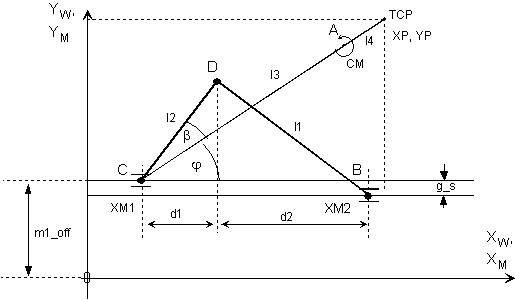
Die ebene XY Kinematik ist als eine der Varianten der Scherenkinematik bekannt. Auf zwei Linearschlitten XM1 und XM2 befinden sich an den Drehgelenken C und B die Stäbe (Länge l2, l1) die am Punkt D ebenfalls drehbar miteinander verbunden sind. Über den fixen Winkelβist der Stab CA (Länge l3) an Stab CD befestigt. An der Spitze dieses Stabes befindet sich die C Achse. Der eigentliche werkzeugtragende Stab (Länge l4) beginnt im Drehpunkt der C-Achse und endet im TCP. Die C-Achse ist bezogen auf die kartesischen Achsen nicht mechanisch geführt, d.h. sie muss abhängig von der Gelenkstellung kompensiert werden.
Versatzdaten der Kinematik:
Parameter | Bedeutung | HD-Versatz | param[i] |
|---|---|---|---|
- | Z-Offset bis Einspannpunkt WZ | HD1 | 0 |
l1 | Stablänge 1 | HD2 | 1 |
l2 | Stablänge 2 | HD3 | 2 |
l3 | Stablänge 3 | HD4 | 3 |
g_s | Versatz Gelenkpunkte C zu B | HD5 | 4 |
β | Fixer Winkel zwischen Stab CD und Stab CA | HD6 | 5 |
m1_off | Y-Position von Antrieb 1, bezogen auf Y -Nullpunkt WKS | HD7 | 6 |
phi_min | Minimalwert für Winkelϕ(0°) | HD8 | 7 |
phi_max | Maximalwert für Winkelϕ(90°) | HD9 | 8 |
- | X Offset | HD10 | 9 |
L4 | Greiferoffset | HD11 | 10 |
- | Kinematikvariante | HD12 | 11 |