KIN_TYP_17
Die Kinematik besteht aus drei translatorischen NC-Achsen. Weiterhin stehen zwei manuell einstellbare rotatorische Achsen zur Verfügung. Diese Achsen sind vom NC-Programm aus nicht ansprechbar.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X, Y, Z | |
Achsindex | 0, 1, 2 | |
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | X, Y, Z | - |
Hilfsachsen | C, A | - |
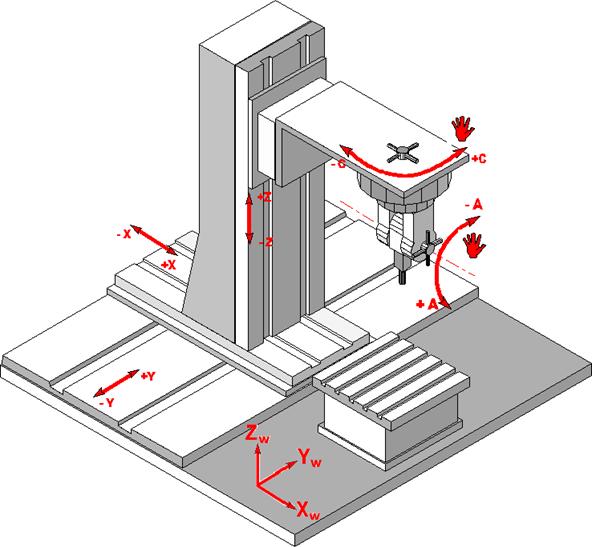
Die Achsen sind im Sinne eines Rechtssystems angeordnet. Die Nullstellung der A-Achse liegt in negativer Richtung der Z-Achse. Bei dem 2 achsigen Werkzeugkopf mit manuell einstellbarer C-Achse und A-Achse ist keine automatische Orientierungseinstellung möglich.
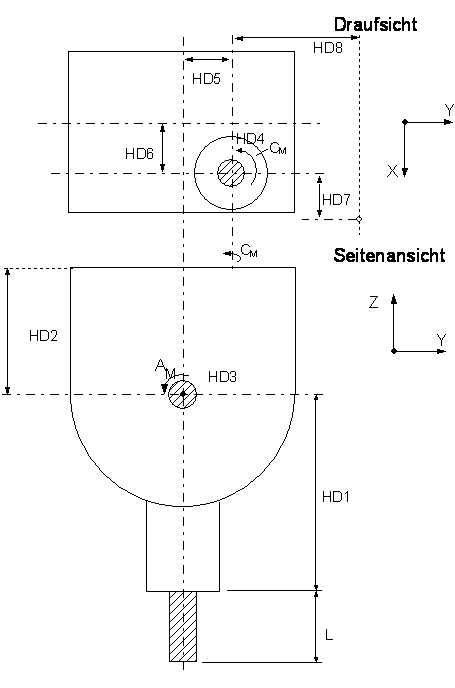
Versatzdaten der Kinematik:
HD-Versatz | param[i] | Bedeutung |
|---|---|---|
HD1 | 0 | Z Achsversatz Werkzeugeinspannpunkt bis Drehpunkt A Achse (Schwenkachse) |
HD2 | 1 | Z Achsversatz Drehpunkt A Achse zu Werkzeugkopfbezugspunkt |
HD3 | 2 | Feste Winkeleinstellung von rotatorischer A Achse (Schwenkachse) |
HD4 | 3 | Feste Winkeleinstellung von rotatorischer C -Achse |
HD5 | 4 | Y Achsversatz Drehpunkt A Achse zu Drehpunkt C Achse (Kröpfung) |
HD6 | 5 | X Achsversatz Werkzeugkopfbezugspunkt bis Drehpunkt C Achse (Kröpfung) |
HD7 | 6 | Statischer Werkzeugversatz in X |
HD8 | 7 | Statischer Werkzeugversatz in Y |