KIN_TYP_12
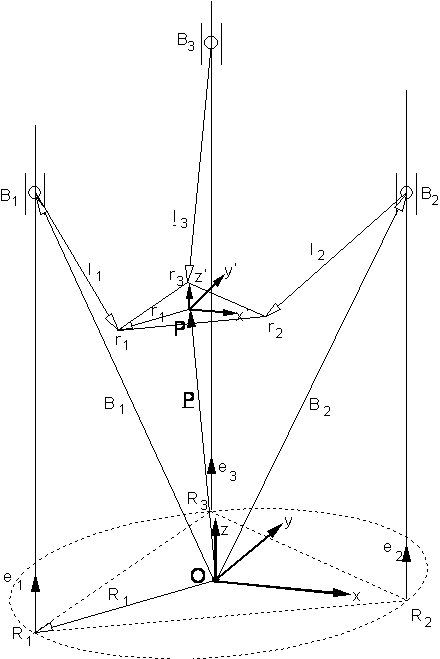
Die als Tripod bezeichnete Stabkinematik besteht aus drei nicht kartesisch angeordneten translatorischen Achsen. Jeweils zwei zueinander parallele Stäbe tragen die Werkzeugträgerplattform. Die Werkzeugorientierung ist konstant.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X, Y, Z (Z1, Z2, Z3) | |
Achsindex | 0, 1, 2 | |
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | X, Y, Z | - |
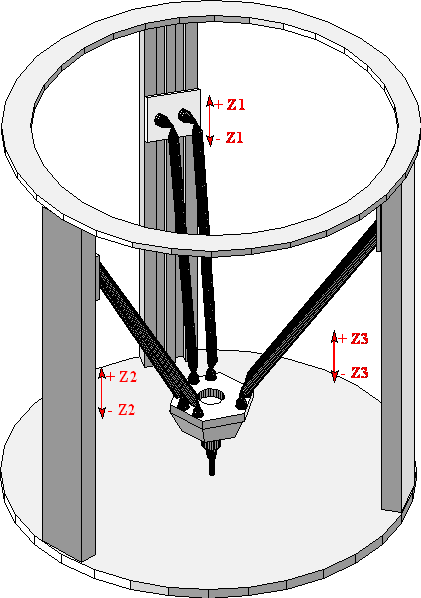
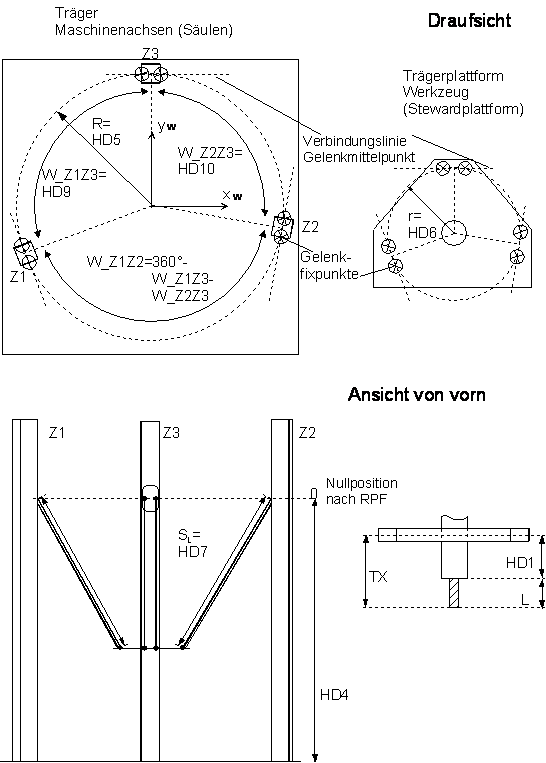
Mit dem Paramter HD8 läßt sich zwischen einem idealen (1) und nichtidealen(0) Tripod umschalten. Eine idealer Tripod hat zwischen allen Säulen eine Winkel von 120°. Der nichtideale Tripod muss durch die Winkel HD9 und HD10 definiert werden. Der dritte Winkel zwischen den Säulen berechnet sich aus:

Versatzdaten der Kinematik:
HD-Versatz | param[i] | Bedeutung |
|---|---|---|
HD1 | 0 | Z Werkzeugversatz |
HD2 | 1 | Y Werkzeugversatz |
HD3 | 2 | X Werkzeugversatz |
HD4 | 3 | Z Achsversatz Maschinennullpunkt |
HD5 | 4 | Radius zu Verbindungslinie Gelenkmittelpunkte Antriebssäulen (großer Kreis) |
HD6 | 5 | Radius zu Verbindungslinie Gelenkmittelpunkte Stewardplattf (kleiner Kreis) |
HD7 | 6 | Stablänge jeweils bis Gelenkmittelpunkt |
HD8 | 7 | Schalter zum Umschalten auf nichtidealen Tripod (freischalten HD9 / HD 10) |
HD9 | 8 | Winkel Säule / Gelenk 3 zu Säule / Gelenk 1 |
HD10 | 9 | Winkel Säule / Gelenk 3 Säule / Gelenk 2 |