KIN_TYP_1
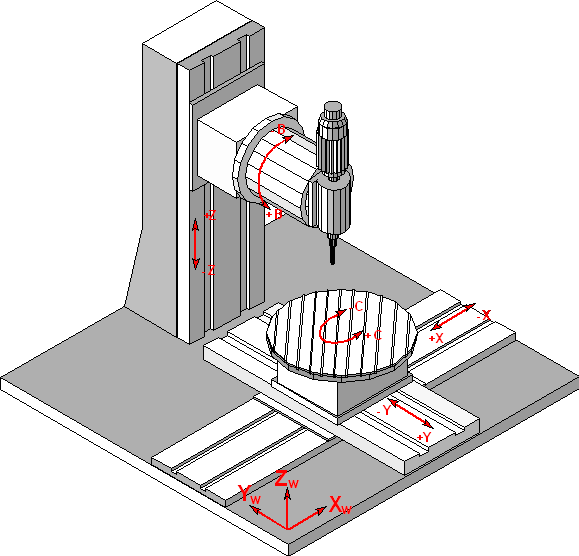
Die Kinematik dieser Maschine besteht aus zwei translatorischen Achsen und einer rotatorischen Achse im Werkstück sowie einer translatorischen und einer rotatorischen Achse im Werkzeug.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X,Y, Z, B, C | |
Achsindex | 0, 1, 2, 3, 4 | |
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | Z, B | X, Y, C |
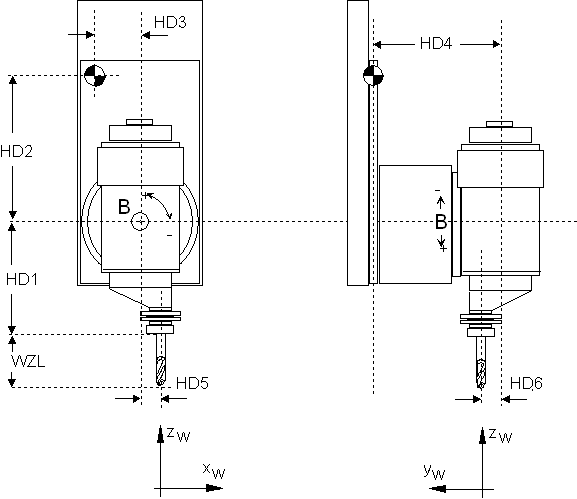
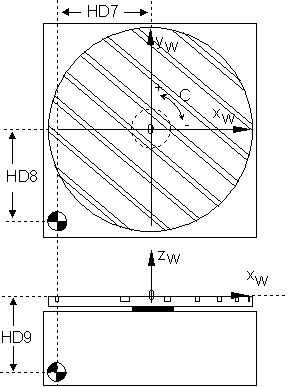
Versatzdaten der Kinematik:
HD-Versatz | param[i] | Bedeutung |
|---|---|---|
HD1 | 0 | Z Versatz Werkzeugeinspannpunkt bis Drehpunkt B Achse |
HD2 | 1 | Z-Versatz Drehpunkt B-Achse bis Bzpkt. WZ-Schlitten |
HD3 | 2 | X-Versatz Bzpkt. WZ-Schlitten bis Drehpunkt B-Achse |
HD4 | 3 | Y- Versatz Bzpkt. WZ-Schlitten bis Drehpunkt B-Achse |
HD5 | 4 | X- Versatz Drehpunkt B Achse bis Werkzeugeinspannpunkt |
HD6 | 5 | Y- Versatz Drehpunkt B Achse bis Werkzeugeinspannpunkt |
HD7 | 6 | X- Versatz Maschinennullpunkt MNP zu Drehachse C |
HD8 | 7 | Y- Versatz Maschinennullpunkt MNP zu Drehachse C |
HD9 | 8 | Z- Versatz Maschinennullpunkt MNP zu Drehachse C |
HD13 | 12 | Drehrichtung B-Achse (*), 0: negativ, 1 positiv |
HD14 | 13 | Drehrichtung C-Achse, 0 positiv, 1 negativ |
(*) Die Drehrichtung der B-Achse ist mathematisch negativ !