Transformationsparameter (P-AXIS-00382)
Variablenname | Typ | Bedeutung (abhängig von Transformations-ID) | Achstyp | Dimension | |
|---|---|---|---|---|---|
param[i] | REAL64 | ID 1 | R | ---- | |
param[0] | h (*) | ||||
param[1] | k0 (*) | ||||
param[2] | k1 (*) | ||||
param[3] | k2 (*) | ||||
(*siehe Funktionsgleichungen) ID 2: | |||||
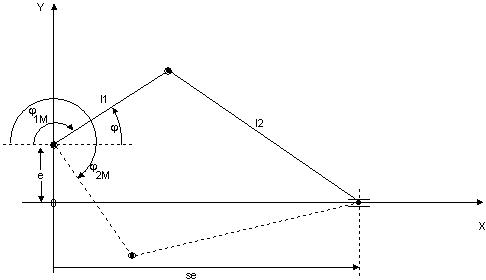
param[0] | Kurbellänge l1 | ||||
param[1] | Pleuellänge l2 | ||||
param[2] | Exzentrizität e | ||||
param[3] | Lösungbereich MotorwinkelϕM 0:.0..180 Grad 1: 180..360 Grad | ||||
param[4] | Bewegungsrichtung Linearachse 0: positiv 1: negativ | ||||
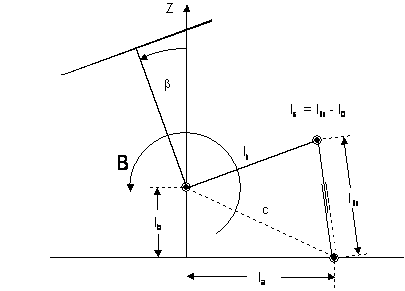
ID 4: | |||||
param[0] | la Abstand 1 Gelenkpunkte | ||||
param[1] | lb Abstand 2 Gelenkpunkte | ||||
param[2] | Kurbellänge lh | ||||
param[3] | Offset Nullstellung Linearachse | ||||
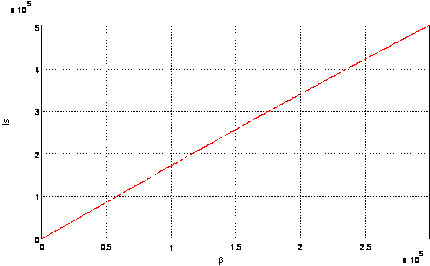
ID 1: e- Funktion

Beispiel:
trafo.command_pos.param[0] 10000
trafo.command_pos.param[1] 1.0
trafo.command_pos.param[2] 2.0
trafo.command_pos.param[3] 1.0 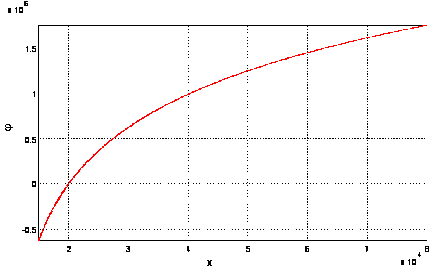
ID2: Schubkurbel

Beispiel:
trafo.command_pos.param[0] 1000000
trafo.command_pos.param[1] 3000000
trafo.command_pos.param[2] 0
trafo.command_pos.param[3] 0 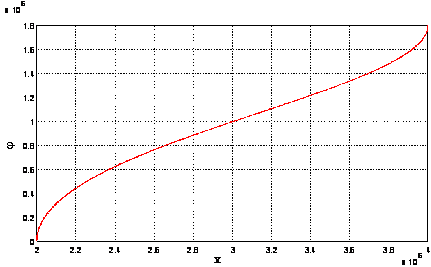
ID4: Kurbel mit Anlenkung durch Linearachse

Beispiel:
trafo.command_pos.param[0] 1000000
trafo.command_pos.param[1] 1410000
trafo.command_pos.param[2] 1000000
trafo.command_pos.param[3] 0 In Nullstellung der Kinematik (β=0) liefert die Abbildung für ls die Position 0. Wenn notwendig kann über param[3] ein Offset zu dieser Position eingestellt werden.