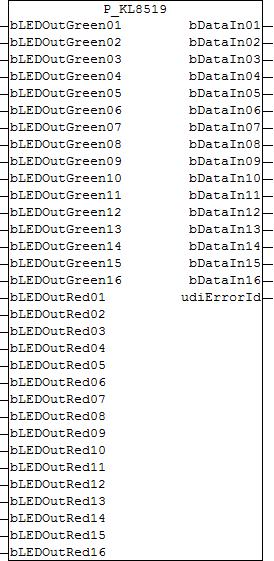
P_KL8519
IO-Template zur Parametrierung einer KL8519: 16-Kanal-Digital-Eingangs-Meldemodul. Dieses Template konfiguriert bei SPS-Neustart die Klemme mit den im Project-Builder eingegebenen Parametern und schaltet danach auf den Prozessdatenbetrieb um. Grundlage dieses Templates ist der Baustein FB_KL8519.
Schnittstelle
VAR_INPUT
bLEDOutGreen01 .. bLEDOutGreen16 : BOOL;
bLEDOutRed01 .. bLEDOutRed16 : BOOL;
bLEDOutGreen01 .. bLEDOutGreen16: Schaltet die grüne LED des jeweiligen Kanals ein, wenn das Schalten der LED aus der SPS heraus über den jeweiligen Parameter bLEDModePLC01 bis bLEDModePLC16 freigegeben ist.
bLEDOutRed01 .. bLEDOutRed16: Schaltet die rote LED des jeweiligen Kanals ein, wenn das Schalten der LED aus der SPS heraus über den jeweiligen Parameter bLEDModePLC01 bis bLEDModePLC16 freigegeben ist.
VAR_OUTPUT
bDataIn01 .. bDataIn16 : BOOL;
udiErrorId : UDINT;
bDataIn01 .. bDataIn16: Dateneingang Kanal 1 bis 16.
udiErrorId: Enthält den befehlsspezifischen Fehlercode des zuletzt ausgeführten Befehls. Siehe Fehlercodes.
Parameter
bLEDModePLC01 .. bLEDModePLC16 : BOOL;
bLEDColourAuto01 .. bLEDColourAuto16 : BOOL;
bLEDModePLC01 .. bLEDModePLC16: Steht einer dieser Parameter auf TRUE, so ist die Standardfunktion der LEDs für diesen Kanal abgewählt. Das heißt, sie wird nicht mehr durch ein High-Signal des Kanals gesetzt, sondern direkt über die Eingänge bLEDOutGreen01 bis bLEDOutGreen16 für die grüne Farbgebung und bLEDOutRed01 bis bLEDOutRed16 für die rote Farbgebung. Ein Setzen beider Farben gleichzeitig ist auch möglich.
bLEDColourAuto01 .. bLEDColourAuto16: Ist der Standardmodus für einen Kanal aktiv (bLEDModePLCxx = FALSE), so lässt sich mit Hilfe dieser Parameter die Signalfarbe des Kanales anwählen: bLEDColourAutoxx = FALSE: die grüne LED ist für den Signalstatus "High" angewählt, bLEDColourAutoxx = FALSE: die rote LED ist angewählt.
bDualColourAuto01 .. bDualColourAuto16: Ist dieser Parameter auf TRUE gesetzt, so befindet sich der jeweilige Kanal im Zweifarb-Betrieb. Ein High-Pegel am Eingang schaltet die unter bLEDColourAutoxx angewählte Farbe, ein Low-Zustand die jeweils andere.
bLEDInvertAuto01 .. bLEDInvertAuto16: Ist einer dieser Parameter auf TRUE gesetzt, so kehrt sich das jeweilige Low- und High-Signalverhalten, wie es mit den Parametern bLEDColourAutoxx und bLEDDualAutoxx definiert ist, noch einmal um.
iKBusOffMode: Mit Hilfe dieses Parameters lässt sich das Verhalten der LEDs im Falle eines K-Bus-Fehlers definieren. Die Einstellung gilt jedoch nur für für die LEDs, bei denen der Standardmodus durch bLEDModePLCxx = TRUE abgewählt wurde. 0: LED bleibt an, sofern sie über die SPS gesetzt wurde. 1: War die LED eingeschaltet, so blinkt sie mit 500ms Taktfrequenz. 2: War die LED eingeschaltet, so blinkt sie mit 1000ms Taktfrequenz. Alle anderen Eingaben werden als "0" interpretiert.
Parametrierfälle am Beispiel Kanal 1 für den Standardmodus bLEDModePLC01 = FALSE:
Zum besseren Verständnis sind hier am Beispiel für den Kanal 1 die Parameterkombinationen für die drei Parameter bLEDColourAuto01, bLEDDualAuto01 und bLEDInvertAuto01 mit dem LED-Schaltverhalten aufgeführt. Alle anderen Kanäle können unterschiedlich parametriert werden.
Ist das Standardverhalten durch bLEDModePLC01 = TRUE abgewählt, so haben die drei Auto-Parameter keinerlei Einfluss mehr, sondern nur noch die Eingänge bLEDOutGreen01 und bLEDOutRed01.
bLEDColourAuto01 | bDualColourAuto01 | bLEDInvertAuto01 | Signalpegel am Eingang 1 | LED-Farbe Kanal 1 |
|---|---|---|---|---|
FALSE | FALSE | FALSE | Low | AUS |
FALSE | FALSE | FALSE | High | grün |
FALSE | FALSE | TRUE | Low | grün |
FALSE | FALSE | TRUE | High | AUS |
FALSE | TRUE | FALSE | Low | rot |
FALSE | TRUE | FALSE | High | grün |
FALSE | TRUE | TRUE | Low | grün |
FALSE | TRUE | TRUE | High | rot |
TRUE | FALSE | FALSE | Low | AUS |
TRUE | FALSE | FALSE | High | rot |
TRUE | FALSE | TRUE | Low | rot |
TRUE | FALSE | TRUE | High | AUS |
TRUE | TRUE | FALSE | Low | grün |
TRUE | TRUE | FALSE | High | rot |
TRUE | TRUE | TRUE | Low | rot |
TRUE | TRUE | TRUE | High | grün |
Entwicklungsinformationen
Entwicklungsumgebung | BACnet Revision | Zielsystem | erforderliches Supplement |
|---|---|---|---|
TwinCAT 2.11 R3/x64 ab Build 2254 | n/a | PC/CX | TS8040 | TwinCAT Building Automation ab V1.1.0 |
Versionshistorie
Versionsnummer | Bemerkungen |
|---|---|
1.0.0.0 | erste Freigabe |