FB_BA_Chrct02
Lineare Interpolation mit 2 Stützstellen
Funktionsbeschreibung
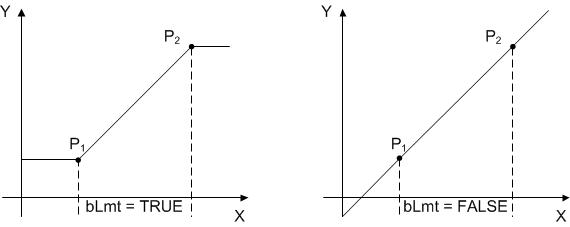
Der Baustein FB_BA_Chrct02 stellt eine Linear-Interpolation mit 2 Stützstellen dar und lässt sich zur Kennlinienerstellung nutzen. Die Kennlinie wird durch die Stützpunkte [lrX1/lrY1] und [lrX2/lrY2] bestimmt. Wenn die Eingangsvariable bLmt TRUE ist, wird lrY von lrY01 und lrY02 begrenzt. Bei bLmt gleich FALSE erfolgt keine Begrenzung von lrY.
Fehlerbehandlung
Die Eingabewerte für lrX[n+1] müssen immer mindestens um den Betrag von 0.0000001 größer als von lrX[n] sein.
Im Fehlerfall zeigt die Variable udiErrId an, an welchem Punkt der Kennlinie die Werte nicht monoton steigend sind.
Ein-/Ausgänge
VAR_INPUT
lrX : LREAL;
lrX01 : LREAL;
lrX02 : LREAL;
lrY01 : LREAL;
lrY02 : LREAL;
bLmt : BOOL;
lrX: Eingangswert der Kennlinie.
lrX01: X-Wert für Stützpunkt P1.
lrX02: X-Wert für Stützpunkt P2.
lrY01: Y-Wert für Stützpunkt P1.
lrY02: Y-Wert für Stützpunkt P2.
bLmt: Begrenzung des Ausgangswerts lrY.
VAR_OUTPUT
lrY : LREAL;
bErr : BOOL;
udiErrId : UDINT;
udiErrArg : UDINT;
lrY: Errechneter Ausgangswert der Kennlinie
bErr: Dieser Ausgang wird auf TRUE geschaltet, wenn die eingetragenen Parameter fehlerhaft sind.
udiErrId / udiErrArg: Enthält die Fehlernummer und das Fehlerargument. Siehe Fehlercodes.
Voraussetzungen
Entwicklungsumgebung | Zielsystem | erforderliche Bibliothek | erforderliches Supplement |
|---|---|---|---|
TwinCAT 2.11 R3/x64 | PC/CX | TcBA-Bibliothek ab V1.0.0 | TS8040 | TwinCAT Building Automation ab V1.0.0 |