Distributed Clocks Diagnosis
Soll-Ist-Vergleich von Ankunftszeiten
Dieser Dialog listet die Ergebnisse eines Soll-Ist-Vergleiches auf. Er zeigt die Güte der EtherCAT-DC-Abweichung an. Innerhalb von EtherCAT-Frames werden Daten zu einer bestimmten Zeit gesendet, und werden diese gesendeten Daten zu einer bestimmten Zeit erwartet. Abweichungen, die mit einer erwarteten Ankunftszeit der Daten und einer tatsächlichen Ankunftszeit der Daten korrelieren, werden hier angezeigt. Je kleiner diese Abweichungen sind, desto besser ist die Qualität der DC-Kommunikation.
DC-Qualität im Run-Modus
TwinCAT bietet im Run-Modus die Möglichkeit, eine vorläufige Aussage über die aktuelle DC-Qualität zu treffen. Wenn eine Task zum Aufruf kommt, dann berechnet sie mit der aktuellen Uhrzeit und ihrer eigenen Zykluszeit den erwarteten Zeitpunkt ihres nächsten Aufrufs. Diesen erwarteten Zeitpunkt ihres nächsten Aufrufs vergleicht sie mit der tatsächlichen Uhrzeit, zu der diese Task zum nächsten Zyklus aufgerufen wird. Dieser Dialog zeigt die DC-Qualität im Run-Modus an.
EtherCAT-DC-Abweichung
- Ein zyklischer EtherCAT-Frame wird von einer Sync Unit synchronisiert.
- Im Config-Mode kann ein zyklischer EtherCAT-Frame von einer unreferenzierten Default-Sync Unit synchronisiert werden.
- Im Run-Betrieb ist eine Sync-Variable erforderlich.
- Eine Sync-Variable ordnet einer Sync Unit eine synchronisierende Task zu.
- Eine synchronisierende Task heißt auch Sync Task.
- Im Run-Betrieb veranlaßt eine mit einer Sync Task synchronisierte Sync Unit das Master-Gerät, zu einer bestimmten Zeit Daten in einem zyklischen EtherCAT-Frame zu senden.
- Die Zeitspanne, die Daten in einem gegebenen EtherCAT-Frame für einen Rundlauf in einem konfigurierten EtherCAT-Ring benötigen werden, kann in guter Näherung vorausberechnet werden.
- Daten in einem gesendeten EtherCAT-Frame werden vom Master-Gerät zu einer bestimmten Zeit, zu der sie den EtherCAT-Ring durchlaufen haben sollten, zurück erwartet.
- Zwischen der tatsächlich gemessenen Laufzeit eines gegebenen EtherCAT-Frames in einem konfigurierten EtherCAT-Ring und der dazugehörigen tatsächlichen Ankunftszeit des EtherCAT-Frames am Master-Gerät auf der einen Seite und zwischen der vorausberechneten erwarteten Ankunftszeit des EtherCAT-Frames am Master-Gerät auf der anderen Seite gibt es in der Regel eine kleine Abweichung.
- Diese Abweichung wird vom Master-Gerät bestimmt, wobei es die Laufzeitmessung mit der ihm innewohnenden Master-Uhr vornimmt.
- In jedem EtherCAT-Netzwerk mit einem DC-Slave-Gerät oder mit mehreren DC-Slave-Geräten gibt es eine Referenz-Uhr.
- Diese Referenz-Uhr im EtherCAT-Netzwerk ist von der Master-Uhr im Master-Gerät verschieden.
- Drift zwischen der Referenz-Uhr und einer lokalen Uhr eines DC-Teilnehmers wird regelmäßig kompensiert. Dazu werden Laufzeitdifferenzen zu DC-Teilnehmern gemessen und lokale Uhren neu eingestellt. Beim Bestimmen der Drift werden die Laufzeitdifferenzen, die aufgrund von Verzögerungen auf den konfigurierten Leitungen entstehen, berücksichtigt.
- Drift zwischen der Master-Uhr im Master-Gerät und der Referenz-Uhr im EtherCAT-Netzwerk wird regelmäßig kompensiert. Die Master-Uhr wird mit der Referenz-Uhr regelmäßig synchronisiert.
- Diese Synchronisierung richtet sich nach der aktuellen Laufzeitverzögerung des EtherCAT-Signals zwischen der Master-Uhr im Master-Gerät und der Referenz-Uhr im EtherCAT-Ring. Bei dieser Synchronisierung werden die Laufzeitdifferenzen, die aufgrund von Verzögerungen des EtherCAT-Signals auf den konfigurierten Leitungen entstehen, berücksichtigt.
- Diese Synchronisierung verschiebt die Master-Zeit im Master-Gerät gegenüber der Referenz-Zeit im EtherCAT-Ring.
- Der Aufruf einer synchronisierenden Task erfolgt durch das Master-Gerät.
- Mit einer verschobenen Master-Zeit im Master-Gerät verschiebt sich auch der Aufruf einer synchronisierenden Task.
- Die Asymmetrie von positiven und negativen Abweichungen zwischen der tatsächlichen Uhrzeit eines nächsten synchronisierenden Taskaufrufs und der erwarteten Uhrzeit eines nächsten synchronisierenden Taskaufrufs spiegelt die Drift zwischen der Master-Uhr im Master-Gerät und der Referenz-Uhr im EtherCAT-Ring wider.
Distributed Clocks Diagnosis
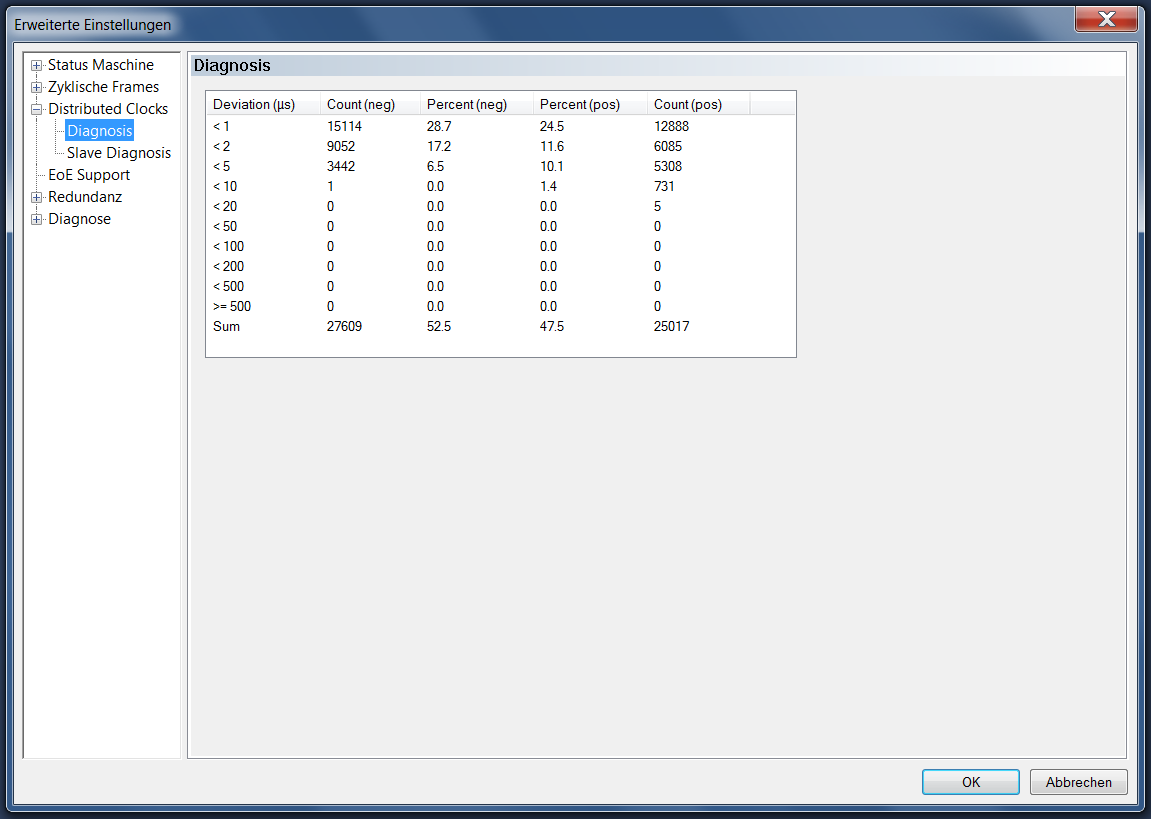
Deviation (µs)
Die Tabellenspalte „Deviation (µs)“ enthält Stufen von Abweichungen zwischen der tatsächlichen Uhrzeit des nächsten Taskaufrufs und der erwarteten Uhrzeit des nächsten Taskaufrufs. In der ersten Tabellenzeile werden Zyklen gezählt, in denen diese Abweichung einen Betrag hat, der kleiner als eine Mikrosekunde ist. In der zweiten Tabellenzeile werden Zyklen gezählt, in denen der Betrag der Abweichung im Intervall [1µs, 2µs[ liegt. In der dritten Tabellenzeile liegt der Betrag der Abweichung im Intervall [2µs, 5µs[, und so fort.
Count(neg)
In der Tabellenspalte „Count(neg)“ werden Abweichungen zwischen der tatsächlichen Uhrzeit des nächsten Taskaufrufs und der erwarteten Uhrzeit des nächsten Taskaufrufs gezählt, deren Wert negativ ist.
Percent(neg)
Die Tabellenspalte „Percent(neg)“ enthält den Wert aus Tabellenspalte „Count(neg)“ in Prozent von der Gesamtzahl der gezählten Zyklen.
Percent(pos)
Die Tabellenspalte „Percent(pos)“ enthält den Wert aus Tabellenspalte „Count(pos)“ in Prozent von der Gesamtzahl der gezählten Zyklen.
Count(pos)
In der Tabellenspalte „Count(pos)” werden Abweichungen zwischen der tatsächlichen Uhrzeit des nächsten Taskaufrufs und der erwarteten Uhrzeit des nächsten Taskaufrufs gezählt, deren Wert positiv ist.
Asymmetrie
Eine Asymmetrie von positiven und negativen Abweichungen zwischen der tatsächlichen Uhrzeit eines nächsten synchronisierenden Taskaufrufs und der erwarteten Uhrzeit eines nächsten synchronisierenden Taskaufrufs ist erforderlich. Sie bildet das Driftverhältnis zwischen der Master-Uhr im Master-Gerät und der Referenz-Uhr im EtherCAT-Ring ab. Bei einem Verhältnis von 0:100 oder bei einem Verhältnis von 100:0 ist das Distributed Clock-System außer Betrieb.
Verteilung der Deviation
Die Zählwerte sollten überwiegend in niedrigen Abweichungsstufen stehen. Wenn ausschließlich Werte „>=500µs“ auftreten, dann ist das Distributed Clock-System außer Betrieb.