Status Maschine Slave Einstellungen
Status Maschine Slave Einstellungen
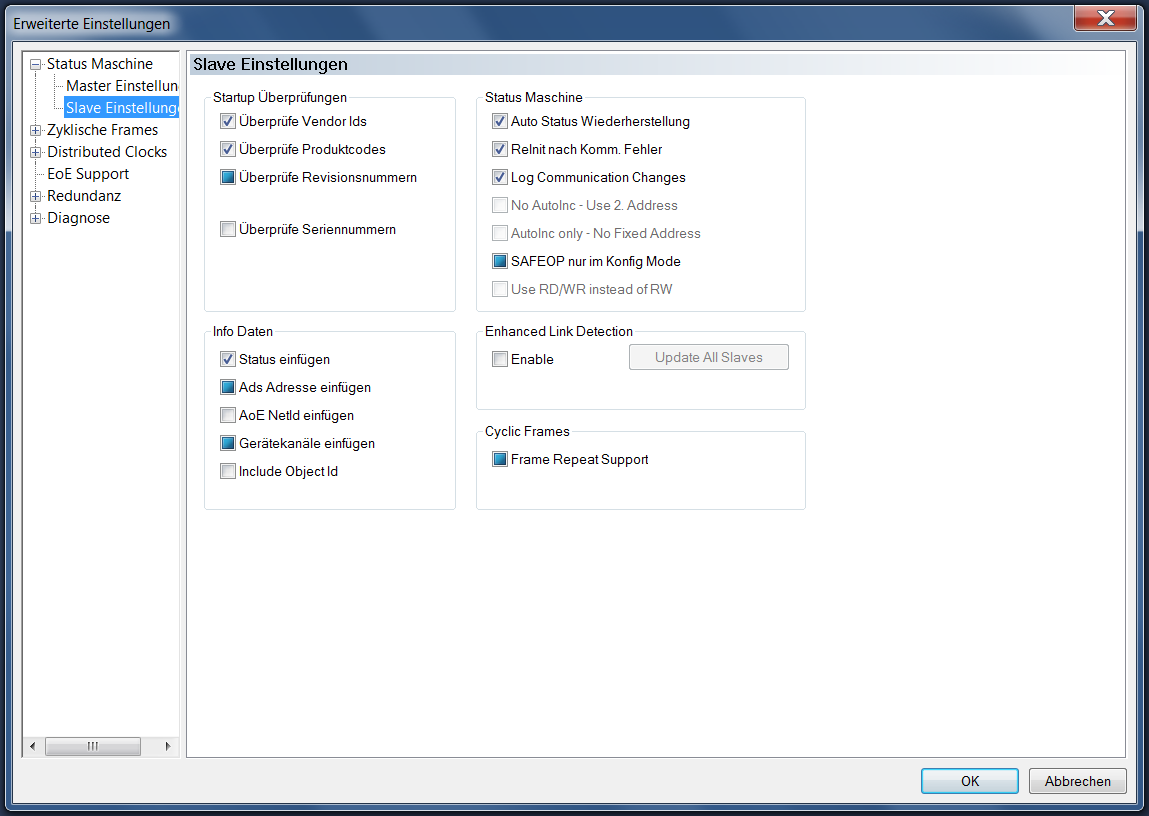
Startup Überprüfungen
Der Benutzer kann bestimmen, welche Slave-Information beim Start vom Master überprüft werden soll. Einstellungen in der Konfiguration der Slave-Geräte gehen den Einstellungen hier vor.
Standardmäßig werden die Hersteller-IDs und die Produkt-Codes geprüft. Dieses Vorgehen wird empfohlen, denn so können weiterentwickelte, jedoch typgleiche, Geräte mit höherer Revision eingesetzt werden, wenn es zum Austauschfall kommt.
Überprüfe Vendor Ids:
Wenn dieses Kontrollkästchen ausgewählt ist, überprüft der Master, ob die Hersteller-ID von jedem Slave-Gerät dieselbe ist wie die konfigurierte.
Überprüfe Produktcodes:
Wenn dieses Kontrollkästchen ausgewählt ist, überprüft der Master, ob der Produkt-Code von jedem Slave-Gerät derselbe ist wie der konfigurierte.
Überprüfe Revisionsnummern:
Wenn dieses Kontrollkästchen ausgewählt ist, überprüft der Master, ob die Revisionsnummer von jedem Slave-Gerät dieselbe ist wie die konfigurierte.
Überprüfe Seriennummern:
Wenn dieses Kontrollkästchen ausgewählt ist, überprüft der Master, ob die Seriennummer von jedem Slave-Gerät dieselbe ist wie die konfigurierte.
Info Daten
Um diese Gruppe von Kontrollkästchen zu aktivieren, muss das Kontrollkästchen „Enable“ in der Gruppe „Info Daten“ des „Master Einstellungen“-Dialogs aktiviert sein.
Status einfügen:
Wenn dieses Kontrollkästchen ausgewählt wird, wird die Eingangsvariable „State“ dem Eintrag „InfoData“ von jedem EtherCAT-Slave-Gerät hinzugefügt.
Ads Adresse einfügen:
Wenn dieses Kontrollkästchen ausgewählt wird, wird die Eingangsvariable „AdsAddr“ dem Eintrag „InfoData“ von jedem EtherCAT-Slave-Gerät hinzugefügt. Diese Variable wird standardmäßig für alle EtherCAT-Slave-Geräte hinzugefügt, die ein Mailbox-Protokoll wie CoE (CANopen over EtherCAT) oder SoE unterstützen.
AoE NetId einfügen:
Wenn dieses Kontrollkästchen aktiviert ist, wird die „NetID“ für „ADS over EtherCAT“ dem Eintrag „InfoData“ hinzugefügt. Standardmäßig ist diese Einstellung inaktiv.
Status Maschine
Auto Status Wiederherstellung:
Wenn dieses Kontrollkästchen ausgewählt wird, dann versucht nach einem Fehlerzustand das EtherCAT-Master-Gerät den ursprünglichen Zustand eines EtherCAT-Slave-Gerätes vor dem Fehler automatisch wiederherzustellen.
Alternativ kann der Zustand eines Slave-Gerätes aus der Applikation gesetzt werden und überwacht werden. Auf diese Weise kann die Applikation das Slave-Gerät in Übereinstimmung mit applikationsspezifischen Erfordernissen ansteuern.
ReInit nach Komm. Fehler:
Wenn dieses Kontrollkästchen angewählt worden ist und die Kommunikation zu einem Slave-Gerät unterbrochen worden ist, dann startet das Master-Gerät das Slave-Gerät neu durch den Zustand „INIT“, sobald die Verbindung wieder hergestellt sein wird. So wird nach wiederhergestellter Verbindung der Zustand „INIT“ auch durchlaufen, wenn das Slave-Gerät nur in den Zustand „SAFEOP“ zurückgefallen ist. Auf diese Weise wird ein sicherer Hochlauf sichergestellt und ein eindeutiger Zustand für das Slave-Gerät erzielt.
No AutoInc – Use 2. Address:
Wenn dieses Kontrollkästchen angewählt ist, dann adressiert das EtherCAT-Master-Gerät die EtherCAT-Slave-Geräte in der Hochlaufphase nicht anhand der Position im EtherCAT-Ring, sondern liest feste Adressen aus den Slave-Geräten aus (EtherCAT Adr.).
AutoInc only – No Fixed Address:
Wenn dieses Kontrollkästchen angewählt ist, dann adressiert das EtherCAT-Master-Gerät die EtherCAT-Slave-Geräte in der Hochlaufphase nicht, indem er feste Adressen aus den Slave-Geräten ausliest (EtherCAT Adr.), sondern anhand der Position im EtherCAT-Ring.
SAFEOP nur im Konfig Mode:
Wenn dieses Kontrollkästchen angewählt ist, dann versuchen die Slave-Geräte im Config-Modus, wenn der Freilauf-Modus aktiviert ist, nicht in den Zustand Operational zu gehen, sondern nur in den Zustand Safe-Operational.
Use RD/WR instead of RW:
Wenn das Kontrollkästchen „Use RD/WR instead of RW“ angewählt worden ist, dann wird ein RW-Kommando zerlegt in ein RD-Kommando und ein WR-Kommando. So werden aus einem einzelnen Datagramm für das RW-Kommando zwei Datagramme, eines für das RD-Kommando und eines für das WR-Kommando. Jedes Datagramm wird von einem eigenen Working-Counter abgeschlossen. Deshalb entsteht mit der Zerlegung des RW-Kommandos eine separate Diagnosemöglichkeit für das Lesen und eine separate Diagnosemöglichkeit für das Schreiben. Auf diese Weise kann, falls ein Fehler auftritt, überprüft werden, ob beim Lesen oder beim Schreiben ein Fehler entsteht.
Enhanced Link Detection
Enable:
Das Kontrollkästchen „Enable“ unter der Überschrift „Enhanced Link Detection“ schaltet eine erweiterte Verbindungserkennung im Konfigurationsmodus ein. Insbesondere bei Schraubverbindungen kann es vorkommen, dass z. B. Port A ordnungsgemäß angeschlossen ist, Port B jedoch nicht. Wenn ein Port nicht korrekt verbunden ist, dann wird er vom zugehörigen Slave-Gerät deaktiviert. Wenn ein Port deaktiviert worden ist, dann wird das EtherCAT-Telegramm vom Tx des deaktivierten Ports an das Rx des deaktivierten Ports weitergeleitet. Auf diese Weise läuft das EtherCAT-Telegramm zum Master-Gerät zurück.
Cyclic Frames
Frame Repeat Support:
Das TwinCAT EtherCAT-Master-Gerät unterstützt das Mehrfachsenden von EtherCAT-Frames zum Zwecke der erhöhten Störsicherheit. Die verwendeten und betroffenen EtherCAT-Slave-Geräte müssen dieses Feature unterstützen. Der Slave-Geräte-Hersteller spezifiziert das in der ESI-Beschreibung. Das Mehrfachsenden von Frames kann hier ein- und ausgeschaltet werden.