Status Maschine Master Einstellungen
Status Maschine Master Einstellungen
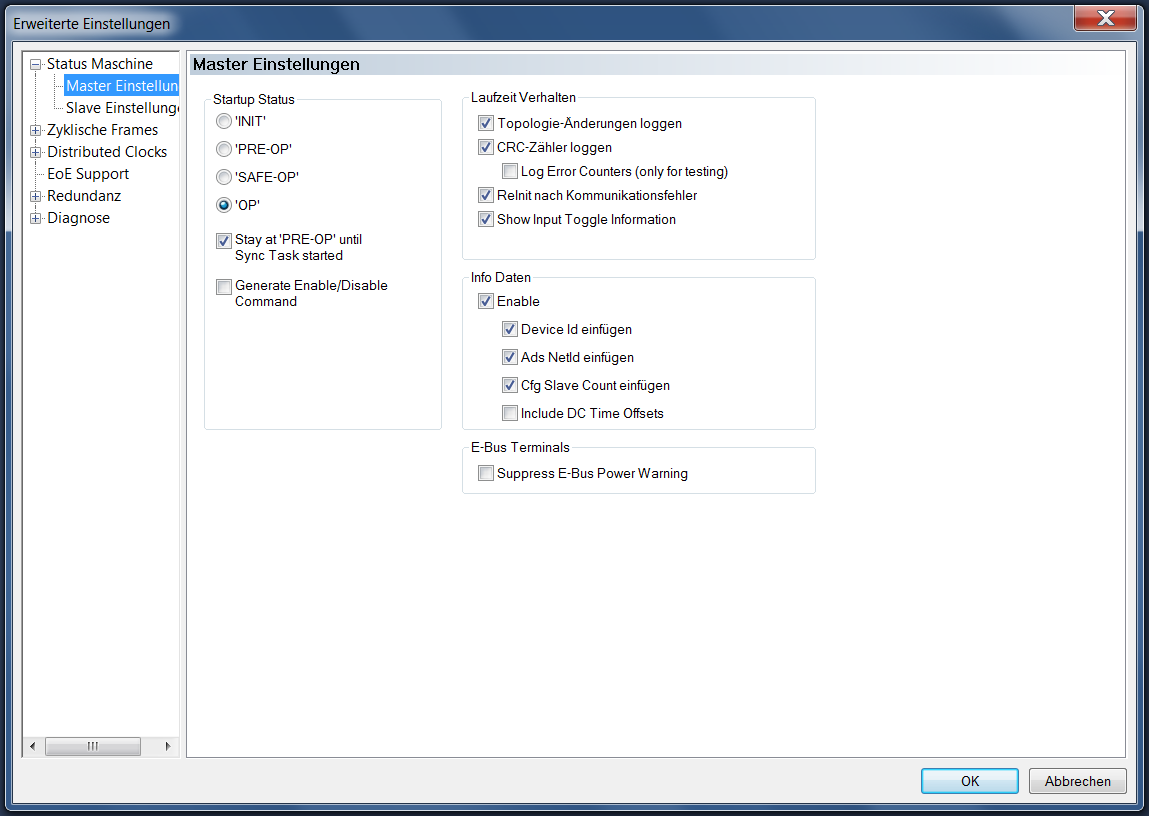
Startup Status
Der EtherCAT-Master läuft nach dem Start in den im Optionsfeld ausgewählten Zustand. Wenn zum Beispiel „OP“ ausgewählt ist, läuft der EtherCAT-Master durch alle vorangehenden EtherCAT-Zustände, um im Zustand „OP“ anzukommen. Um nach dem Start im „INIT“-Zustand zu bleiben, müssen Sie die Option „INIT“ auswählen.
Stay at „PRE-OP“ until Sync Task started
Der EtherCAT-Master wartet im Zustand „PRE-OP“, bis die synchronisierende Task ihre Frames startet.
Laufzeit Verhalten
Topologie-Änderungen loggen: Wird dieses Kontrollkästchen ausgewählt, dann werden Topologie-Änderungen protokolliert.
CRC-Zähler loggen: Wird dieses Kontrollkästchen ausgewählt, dann werden die Zähler für die Zyklische Redundanzprüfung protokolliert.
ReInit nach Kommunikationsfehler: Wird dieses Kontrollkästchen ausgewählt, dann werden alle Slave-Geräte zumindest temporär in den Zustand „INIT“ gesetzt, nachdem ein Kommunikationsfehler aufgetreten ist. Hat der EtherCAT-Master den Zustand „OP“ bei dem Kommunikationsfehler verlassen, dann versucht TwinCAT, den Master wieder in den Zustand „OP“ zu versetzen, wobei auch der Zustand „INIT“ durchlaufen wird. Wird der Zustand des EtherCAT-Masters aus der Applikation heraus gesteuert, dann muss das Kontrollkästchen unbedingt deaktiviert werden, weil sich anderenfalls beide Mechanismen gegenseitig behindern können. Beide greifen über ADS auf den EtherCAT-Master zu.
Show Input Toggle Information: Ist dieses Kontrollkästchen aktiviert, wird bei Eingangsklemmen eine zusätzliche Toggle-Variable eingeblendet, die verknüpft werden kann. Sie ändert ihren Zustand, 0 oder 1, bei jedem neu empfangenen Datagramm.
Info Daten
Enable: Wird dieses Kontrollkästchen ausgewählt, dann wird im E/A-Baum das „Info“-Prozessabbild unter dem EtherCAT-Gerät hinzugefügt. Zusätzlich wird dem EtherCAT-Gerät und werden den verbundenen EtherCAT-Slave-Geräten ein Eintrag „InfoData“ hinzugefügt. Der Eintrag „InfoData“ enthält Eingangsvariablen, die Information über das EtherCAT-Gerät liefern und die sich normalerweise nicht sehr oft ändern. Variablen, die auf die „Info“-Abbilder abgebildet werden, werden nicht zyklisch aktualisiert, sondern nur, wenn das Abbild sich geändert hat. Die Variable „ChangeCnt“ zeigt an, wie oft der Inhalt eines Abbildes sich geändert hat.
Device Id einfügen: Wird dieses Kontrollkästchen ausgewählt, wird die Eingangsvariable „DevId“ dem Eintrag „InfoData“ hinzugefügt. „DevId“ ist die Geräte-ID des EtherCAT-Gerätes.
Ads NetId einfügen: Wird dieses Kontrollkästchen ausgewählt, wird die Eingangsvariable „AmsNetId“ dem Eintrag „InfoData“ hinzugefügt. Die „AmsNetId“ ist ein Parameter, der für die Kommunikation über ADS mit dem EtherCAT-Master-Gerät benötigt wird. Der ADS-Port des EtherCAT-Master-Gerätes ist immer 0xFFFF (65535) und der ADS-Port eines EtherCAT-Slave-Gerätes ist gleich der festen Adresse (siehe EtherCAT Adr) des Slave-Gerätes.
Cfg Slave Count einfügen: Wird dieses Kontrollkästchen angewählt, wird die Eingangsvariable „CfgSlaveCount“ dem Eintrag „InfoData“ hinzugefügt. Die Variable „CfgSlaveCount“ ist vom Typ „UINT“ und enthält die Anzahl konfigurierter EtherCAT-Slave-Geräte.
Include DC Time Offsets: Wird dieses Kontrollkästchen angewählt, werden die Eingangsvariablen „DcToTcTimeOffset“ und „DcToExtTimeOffset“ dem Eintrag „InfoData“ hinzugefügt. Die Variable „DcToTcTimeOffset“ ist vom Typ „LINT“ und enthält den Offset zwischen Distributed Clock-Zeit und TwinCAT-Zeit in Nanosekunden. Die Variable „DcToExtTimeOffset“ ist vom Typ „LINT“ und enthält den Offset zwischen Distributed Clock-Zeit und externer Zeit in Nanosekunden.
E-Bus Terminals
Suppress E-Bus Power Warning: Standardmäßig warnt TwinCAT vor der Überschreitung der maximalen Stromaufnahme eines EtherCAT-Kopplers (zum Beispiel EK1100). Wird dieses Kontrollkästchen angewählt, wird diese Warnung unterdrückt.