Beschreibung
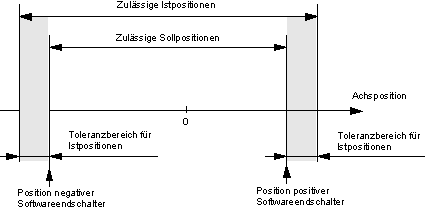
Die Position der Softwareendschalter wird dazu verwendet, die Soll- und Istposition einer Achse zu überwachen. Für jede Achse kann ein positiver (P-AXIS-00178) und ein negativer Softwareendschalter (P-AXIS-00177) parametriert werden.
Die Positionen der Softwareendschalter sind immer auf das Achskoordinatensystem bezogen.
Wirksamkeit
Die Sollpositionen werden während des Look-Ahead, die Istpositionen bei der Lageregelung auf das Überschreiten der Softwareendschalterpositionen überwacht. Es wird deshalb zwischen sollwertseitiger und istwertseitiger Softwareendschalterüberwachung unterschieden.
Die Überwachung von Sollpositionen und Istpositionen unterscheidet sich dadurch, dass für Istpositionen eine Toleranz für die Überwachung auf Überschreiten der Softwareendschalterposition (P-AXIS-00179) parametriert werden kann. Damit kann für Istpositionen vermieden werden, dass geringfügiges Überschwingen zu einer Fehlermeldung der CNC führt.
Aktivierung
Die Überwachung der Soll- und Istpositionen einer Achse durch die Softwareendschalterpositionen ist aktiviert, sobald diese Achse referenziert ist. Sie ist danach in allen zur Verfügung stehenden Betriebsarten aktiv. Dabei ist es zulässig, dass eine Achse die Softwareendschalterposition anfährt.
| |
Die Überwachung der Soll- und Istpositionen auf Überschreiten der Softwareendschalterpositionen ist nicht wirksam bei rotatorischen Achsen, die als Moduloachsen konfiguriert wurden. |

Meldungen
Automatikbetrieb und Handsatz, Achse referenziert
Wird durch einen NC-Satz eine Sollposition berechnet, die eine Softwareendschalterposition überschreitet, wird dieser NC-Satz nicht ausgeführt. Es wird eine Meldung [ID: 120002, bzw. 120003] erzeugt. Das NC-Programm wird an diesem NC-Satz abgebrochen und die an der Bewegung beteiligten Achsen angehalten. Die Sollkontur wird dabei nicht verletzt.
Die Steuerung muss durch einen Reset zurückgesetzt werden.
Überschreitet der Istwert der Achsposition die Softwareendschalterpositionen, wird eine Meldung (ID: 70021, bzw. 70022) erzeugt. Die betroffene Achse wird mit einem linearen Geschwindigkeitsprofil abgebremst. Die Sollkontur kann dabei verletzt werden, wenn mehrere Achsen an der Bewegung beteiligt waren.
Die Steuerung muss durch einen Reset zurückgesetzt werden.
Handbetrieb ohne parallele Interpolation (G200), Achse referenziert
Der Verfahrweg einer Achse wird durch die Softwareendschalterpositionen begrenzt. Beim Tippbetrieb (Continuous jog) wird die Softwareendschalterposition angefahren.
Bei Jogbetrieb (Incremental jog) wird der Schritt nicht mehr ausgeführt, der zu einer Überschreitung der Softwareendschalterposition führt. Es wird eine Meldung (ID: 150008) generiert. Die betroffene Achse kann in entgegengesetzter Verfahrrichtung bewegt werden.
Handbetrieb ohne parallele Interpolation (G200), Achse nicht referenziert
Ist die Achse nicht referenziert werden für die positive Softwareendschalterposition die positive Handbetriebsoffsetgrenze, für die negative Softwareendschalterposition die negative Handbetriebsoffsetgrenze verwendet. Diese sind im Achsparameterdatensatz über die Parameter P-AXIS-00137 / P-AXIS-00138 (offsetgrenze_neg / offsetgrenze_pos) definiert [Handbetriebsoffsetgrenzen].
Beim Tippbetrieb werden die Handbetriebsoffsetgrenzen angefahren.
Beim Jogbetrieb wird bei Überschreiten der Handbetriebsoffsetgrenzen, eine Meldung (ID: 150008) erzeugt. Der Jogschritt der zur Überschreitung der Handbetriebsoffsetgrenze führt wird nicht ausgeführt. Die Achse lässt sich in entgegengesetzter Richtung verfahren.