Beispiel
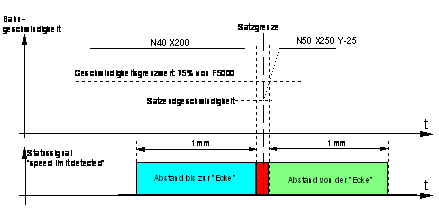
Wenn die programmierte Kontur z.B. aufgrund einer Ecke zu einem Bremsvorgang auf der Bahn führt, bei dem die Geschwindigkeit unter den Grenzwert sinkt, so wird das Statussignal „speed limit detect“ in Abhängigkeit der eingestellten Parameter erzeugt.
Parameter
Auszug aus Kanalparameterliste [Kanalparameter]:
# Parametrierung Speed limit Look Ahead
# ======================================
speed_limit_look_ahead.f_enable 1
speed_limit_look_ahead.v_limit 750
speed_limit_look_ahead.f_time 0
speed_limit_look_ahead.dist_to_corner 10000
speed_limit_look_ahead.dist_from_corner 10000
speed_limit_look_ahead.f_override_weight_v_limit 0 | Die Parameter können auch über das NC-Programm durch entsprechende Variablen (V.G.SPEED_LIMIT.*) verändert werden [Programmierung]. |
Programmbeispiel
%main
X0 Y0
N10 G01 X50 F5000
N20 X100
N30 X150
N40 X200
(Geschwindigkeitseinbruch am Ende des NC Satzes)
N50 X250 Y-25
N60 X300 Y-50
M30Aus den oben aufgeführten Parametern und dem F Wort im NC-Programm ergibt sich:
Geschwindigkeitsgrenzwert = 75% von programmierter Geschwindigkeit
-> v_limit = 3750mm/min (62500um/s)
Im NC-Programmbeispiel fällt die Bahngeschwindigkeit aufgrund eines Konturknickwinkels von 30 Grad auf 8562um/s am Satzübergang N40 -> N50, d. h. das Statussignal „speed limit detect“ wird 1mm vor Unterschreiten der Grenzgeschwindigkeit bei Satzende N40 gesetzt und 1mm nach Überschreiten der Grenzgeschwindigkeit am Satzanfang N50 zurückgesetzt.