Methode 1: Kennlinie a(n) in Polynom- oder Hyperbelform
Im Bereich oberhalb der Grenzdrehzahl wird die aktuelle Beschleunigung wahlweise über ein Polynom dritter Ordnung oder über eine Hyperbelfunktion vorgegeben. Bei beiden Kennlinien wird im Bereich unterhalb von ngrenzeine konstante Beschleunigung akonst eingesetzt. Diese entspricht der Beschleunigung bei Nenndrehzahl. Die Kennlinien gelten sowohl für die Aufbau- als auch für die Abbauphase der Geschwindigkeit.
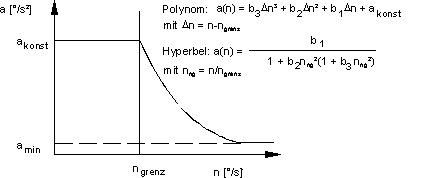 Abb.14: Verlauf der Beschleunigung gemäß Polynom oder Hyperbel
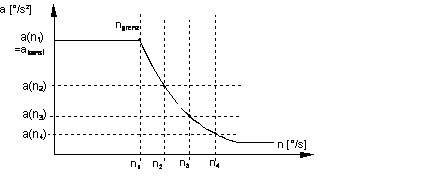
Abb.14: Verlauf der Beschleunigung gemäß Polynom oder HyperbelZur Bestimmung der Koeffizienten der Kennlinien werden Stützpunkte auf der Antriebskennlinie a(n) verwendet. Vier bzw. drei Stützpunkte sind für die Bestimmung erforderlich.
Ein Stützpunkt P1=(n1, (a(n1)) liegt durch den Parameter für die konstante Beschleunigung akonst und die Grenzdrehzahl ngrenz bereits fest, die restlichen drei bzw. zwei können vom Anwender beliebig auf der Antriebskennlinie a(n) festgelegt werden. Sinnvollerweise lässt man die Abszissenwerte in konstantem Abstand laufen. Die Bestimmungsgleichungen für die Koeffizienten sind im Folgenden aufgeführt.
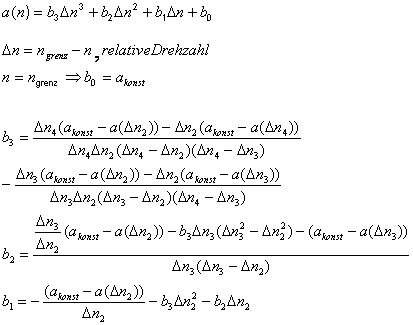
Polynom
Beispiel Kennlinienbestimmung
Stützpkt. | Beschleunigung a [°/s] 2 | Drehzahl n [°/s] |
|---|---|---|
1 | 16000 | 12000 |
2 | 8000 | 24000 |
3 | 4000 | 36000 |
4 | 2000 | 48000 |
a_konst = 16000[Grad/s2] bis ngrenz = 12000 [Grad/s]
Man erhält für die Koeffizienten:
b3 = -1.92901234E-10 [s/°2]
b2 = 2.08333333E-5 [1/°]
b1 = -0.88888888 [1/s]
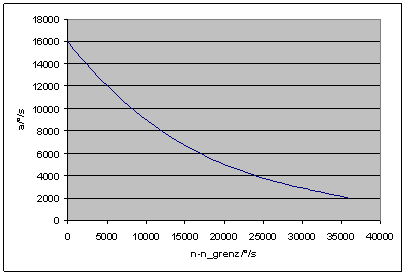
b0 = a_konst = 16000 [°/s2]Ab Nenndrehzahl (ngrenz) ergibt sich damit folgender Kennlinienverlauf
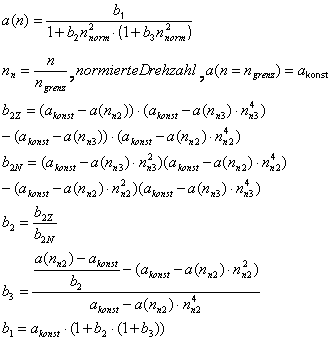
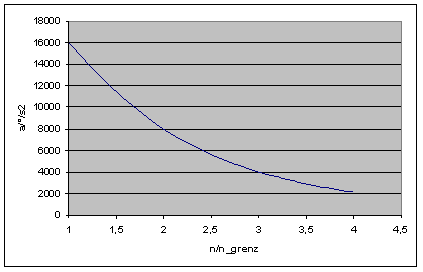
Hyperbel
Beispiel Kennlinienbestimmung
Stützpkt. | Beschleunigung a [°/s] 2 | Drehzahl n [°/s] |
|---|---|---|
1 | 16000 | 12000 |
2 | 8000 | 24000 |
3 | 4000 | 36000 |
a_konst = 16000[Grad/s2] bis ngrenz = 12000 [Grad/s]
Man erhält für die Koeffizienten:
b2 = 4.166666E-1[]
b3 = 2.857142E-2[]
b1 = 2.285714E4[°/s2]Ab Nenndrehzahl (ngrenz) ergibt sich damit folgender Kennlinienverlauf
Parameter
P-AXIS-00202 | Kennlinientyp: 1 (Hyperbel) oder 2 (Polynom) |
P-AXIS-00130 | Grenzdrehzahl ngrenz |
P-AXIS-00007 | Konstante Beschleunigung akonst für n<ngrenz |
P-AXIS-00010 | Minimale Beschleunigung amin |
P-AXIS-00026 | Koeffizient b1 |
P-AXIS-00027 | Koeffizient b2 |
P-AXIS-00028 | Koeffizient b3 |
Parametrierungsbeispiele
#
beschl_kennlinie.typ 1 Hyperbelform
beschl_kennlinie.a_min 1400 [ ° /s*s]
beschl_kennlinie.n_grenz 12000000 [10-3 ° /s]
beschl_kennlinie.a_konst 16000 [ ° /s*s]
beschl_kennlinie.b1 2.285714E4 [°/s*s]
beschl_kennlinie.b2 4.166666E-1 []
beschl_kennlinie.b3 -2.857142E-2 []
##
beschl_kennlinie.typ 2 Polynomform
beschl_kennlinie.a_min 2000 [ ° /s*s]
beschl_kennlinie.n_grenz 12000000 [10-3 ° /s]
beschl_kennlinie.a_konst 16000 [ ° /s*s]
beschl_kennlinie.b1 -0.88888888 [1/s]
beschl_kennlinie.b2 2.08333333E-5 [1/Grad
beschl_kennlinie.b3 -1.92901234E-10 [s/Grad²]
#