EtherCAT
Antriebsparameter
Zur Verwendung der Messfunktion muss im Antrieb einem Digitaleingang die Funktion „Positionslatch“ zugeweisen werden.
Dazu muss dem Antriebsparameter IN1MODE oder IN2Mode der Wert 26 zugewiesen werden.
Der Messtaster ist an den jeweils verwendeten digitalen Eingang (X3 Klemme 11 oder 12) anzuschliessen.
Desweiteren muss dem Antriebsparameter DRVCNFG2 der Wert 6 zugewiesen werden.
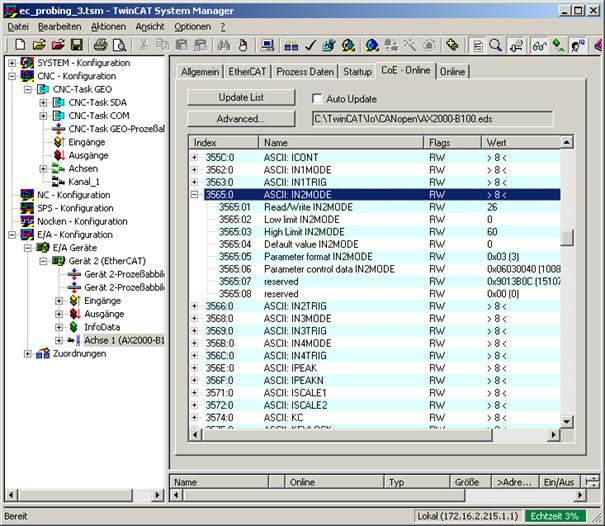
Konfiguration Digitaleingang 2 als Messeingang
Parametrierung des zyklischen Telegramms
Im zyklischen Istwerttelegramm muss bei Verwendung der Mess-Funktionalität ein Telegrammtyp konfiguriert werden, in dem die folgenden Daten übertragen werden:
- Latch status word
- Latch position
Im zyklischen Sollwerttelegramm muss ein Telegrammtyp konfiguriert werden, in dem das Latch control word übertagen wird.
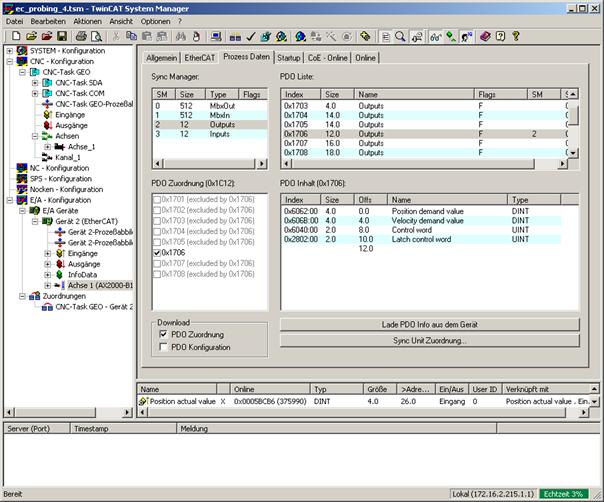
Zyklisches Sollwerttelegramm zum Messen
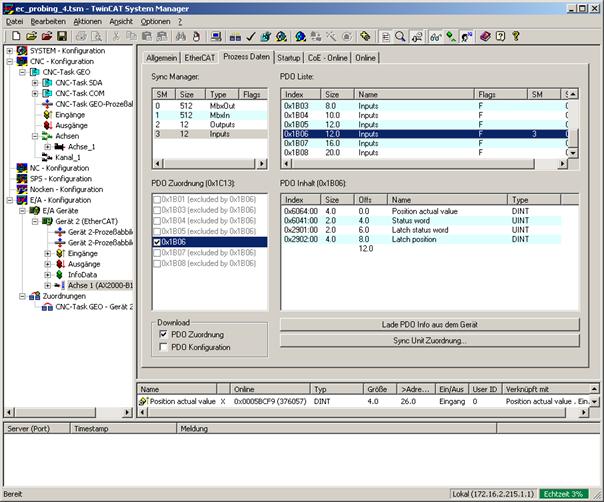
Zyklisches Istwerttelegramm zum Messen
Achsparameter
Für EtherCAT-Antriebe sind in den Achsparameterlisten die folgenden Einträge zu belegen:
- Auswahl der Flanke des Messignals durch P-AXIS-00113.
- Auswahl des am Antrieb verwendeten Messeinganges (Digitaler Eingang 1 oder 2) mittels Parameter P-AXIS-00295.
P-AXIS-00113 | Latchen bei positiver Meßsignalflanke:
|
P-AXIS-00295 | Auswahl der Nummer des digitalen Messeingangs im Antrieb (1/2):
|