SERCOS
Antriebsparameter
Zur Verwendung der Messfunktion müssen im Antrieb die folgenden Parametrierungen durchgeführt werden:
- verwendete Echtzeitsteuer- und Statusbits
- zu verwendenter Messtaster
- Messtaster-Steuerparameter
- Messwert im zyklischen Telegramm.
Die vom jeweiligen Antrieb unterstützten Parameter sind dabei der Antriebsdokumentation zu entnehmen.
Zusätzlich kann es noch sein, dass ein digitaler Eingang des Antriebsverstärkers als Messeingang parametriert werden muss. Einzelheiten hierzu sind ebenfalls der Dokumentation des Antriebsverstärkers zu entnehmen.
Echtzeitbits
Zum Messen werden beide Echtzeitstatusbits sowie ein Echtzeitsteuerbit benötigt.
Durch die Echtzeitstatusbits werden die folgenden Informationen vom Antrieb zum NC-Kern übertragen:
- Flanke am Messeingang aufgetreten (Messung erfolgt).
- Messtaster betätig.
Des Weiteren wird ein Echtzeitsteuerbit benötigt, mit dem die Flankenauswertung des Messeingangs im Antrieb aktiviert wird (Freigabe Messen).
Die Zuordnung der vom NC-Kern verwendeten Steuer- und Statusbits wird im NC-Kern durch den Parameter P-AXIS-00060 eingestellt. Zusätzlich müssen im Antriebsverstärker noch Parameter entsprechend eingestellt werden.
Die folgende Tabelle zeigt die NC-Kern-seitige Zuordnung von P-AXIS-00060 zu den verwendeten Status- und Steuerbits.
P-AXIS-00060 | Steuerbits | Statusbits | |
| Messen | Messung | Messtaster |
0, kein Eintrag | Echtzeitsteuerbit 1 | P-AXIS-00106 | Echtzeitstatusbit |
1 | Echtzeitsteuerbit 1 | Echtzeitstatusbit | Echtzeitstatusbit |
2 | Echtzeitsteuerbit 2 | Echtzeitstatusbit | Echtzeitstatusbit |
 | Es wird empfohlen P-AXIS-00060 entweder auf dem Wert 1 oder 2 zu setzen. Der Wert 0 ist nur aus Gründen der Rückwärtskompatibilität vorhanden und erfordert zusätzliche Einstellungen (P-AXIS-00106). |
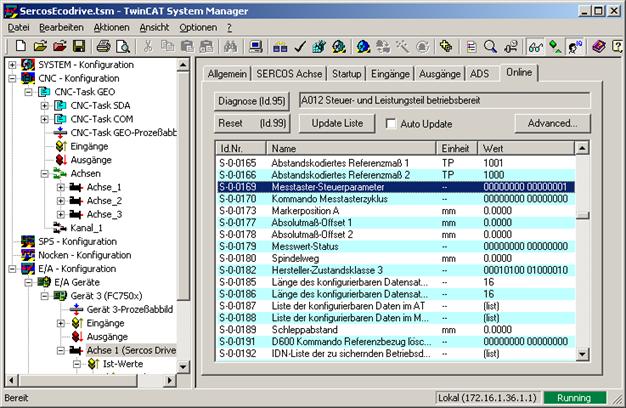
Meßtaster-Steuerparameter
Durch den Messtaster-Steuerparameter (S-0-0169) wird konfiguriert, welcher Messtaster und welche Flanke des Messsignals im Antrieb zum Messen verwendet werden soll. Abhängig von diesem Parameter werden die erfassten Positionen in unterschiedlichen SERCOS-Idents abgelegt, diese SERCOS-Idents müssen dann im zyklischen Istwerttelegramm des Antriebs übertragen werden.
Messtaster/Flanke | Messtaster-Steuerparameter | Messwert-Ident |
|---|---|---|
Messtaster 1, positive Flanke | S-0-0169 = 1 | S-0-0130 |
Messtaster 1, negative Flanke | S-0-0169 = 2 | S-0-0131 |
Messtaster 2, positive Flanke | S-0-0169 = 4 | S-0-0132 |
Messtaster 2, negative Flanke | S-0-0169 = 8 | S-0-0133 |
Parametrierung des zyklischen Telegramms
Je nach Wert des Messtaster-Steuerparameters ist im zyklischen Istwerttelegramm die in der obigen Tabelle angegebene Messwert-Ident zu konfigurieren.
Achsparameter
Für SERCOS-Antriebe sind in den Achsparameterlisten die folgenden Einträge zu belegen:
P-AXIS-00116 | Messen über SERCOS-Bus: kenngr.mess_signal_sercos 1 |
P-AXIS-00113 | Latchen bei positiver Meßsignalflanke: kenngr.mess_neg_flanke 0 |
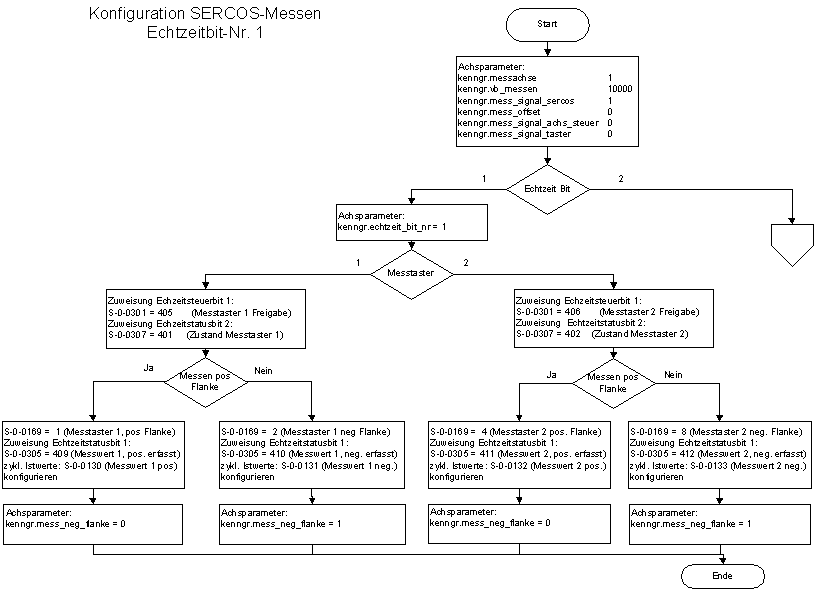
Parametrierung eines SERCOS-Antriebes
Auf den folgenden beiden Seiten werden die zur Parametrierung eines SERCOS-Antriebes nötigen Schritte in Form eines Flußdiagrammes dargestellt.
Beispiel
Zur Konfiguration der Messfunktion eines SERCOS-Antriebes mit der steigenden Flanke von Messtaster 1 unter Verwendung der Echtzeitsteuer- und Statusbits 1 sind im Antrieb und NC-Kern die folgenden Parameter nötig.
Achsparameter
kenngr.hub_messtaster 2000
kenngr.vb_messen 2000
kenngr.messachse 1
kenngr.mess_signal_sercos 1
kenngr.echtzeit_bit_nr 1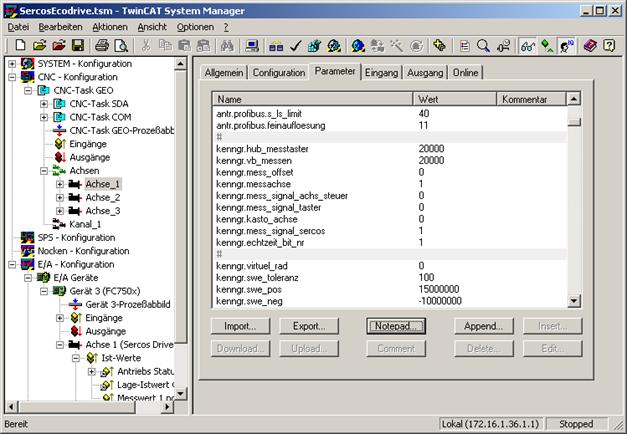
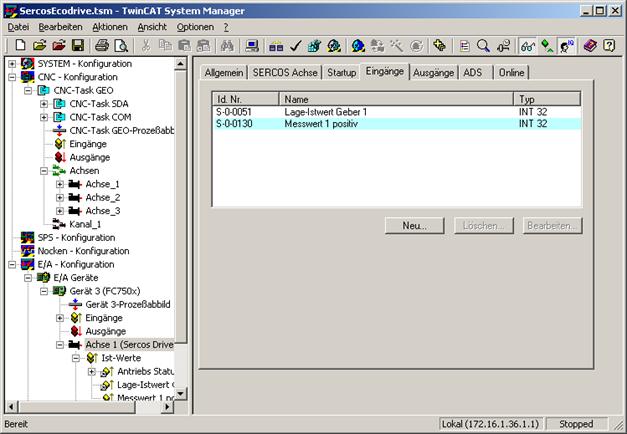
Zyklisches Telegramm
Bei der Konfiguration des zyklischen Telegramms muss Ident. S-0-0130 mit konfiguriert werden:
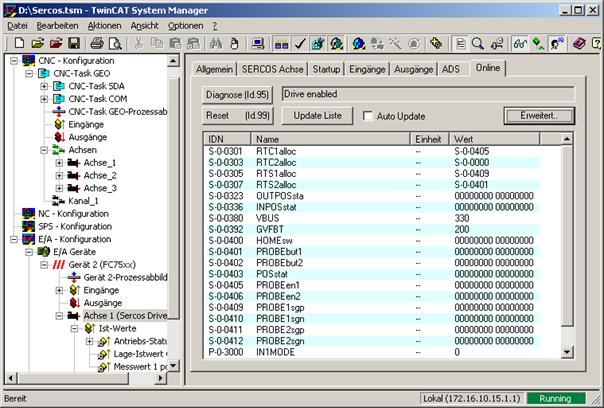
Antrieb
Es werden die Echtzeitbits 1 und Messtaster 1 verwendet:
- S-0-0301 = 405 (Echtzeitsteuerbit 1 = Messtaster 1 Freigabe)
- S-0-0305 = 409 (Echtzeitstatusbit 1 = Messwert 1, positiv erfasst)
- S-0-0307 = 401 (Echtzeitstatusbit 2 = Messtaster 1)
Messtaster-Steuerwort
Im Messtaster-Steuerwort ist der Wert 1 einzutragen:
- S-0-0169 = 1 (Messtaster 1 pos. Flanke)