Optionen
Über den Dialog Optionen geben Sie die Befehle vor, die für alle SMI Geräte ausgeführt werden, wenn das entsprechende Ereignis eintritt.
 | Input 1 und Input 2, Auswirkung auf den Automatikmodus Die digitalen Eingänge Input 1 und Input 2 (Klemmstelle 2 und 6) haben gegenüber der automatischen Steuerung durch das PLC-Programm eine Vorrangstellung. Werden die digitalen Eingänge betätigt, so werden andere PLC gesteuerte SMI-Befehle gesperrt. Zur Freigabe muss eine positive Flanke an den bResetInactiveProcessImage Eingang des FB_KL6831KL6841Communication gelegt werden. Siehe Dokumentation TwinCAT PLC Lib:SMI. |
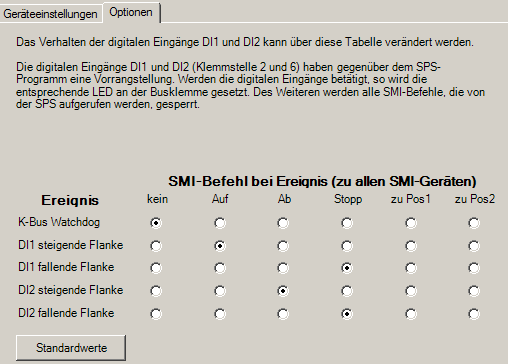
Ereignis | Beschreibung |
|---|---|
K-Bus Watchdog | Die Klemme wird vom K-Bus nicht mehr angesprochen. |
DI1 steigende Flanke | Eine steigende Flanke liegt am Eingang DI1 an. |
DI1 fallende Flanke | Eine fallende Flanke liegt am Eingang DI1 an. |
DI2 steigende Flanke | Eine steigende Flanke liegt am Eingang DI2 an. |
DI2 fallende Flanke | Eine fallende Flanke liegt am Eingang DI2 an. |
SMI-Befehle | Beschreibung |
|---|---|
Kein | Es wird kein Befehl ausgeführt. |
Auf | Alle Antriebe fahren bis zur oberen Endlage auf. |
Ab | Alle Antriebe fahren bis zur unteren Endlage ab. |
Stopp | Der Motorlauf wird gestoppt. |
Zu Pos1 | Der Antrieb fährt zur motorseitig konfigurierten Fixposition Pos1. |
Zu Pos2 | Der Antrieb fährt zur motorseitig konfigurierten Fixposition Pos2. |
Standardwerte
Über den Button Standardwerte stellen Sie die Defaulteinstellung (s. Abb. oben) wieder her.