Distributed-Clocks – EtherCAT-Master koppeln
In diesem Kapitel wird gezeigt, wie zwei oder mehrere EtherCAT-Master gekoppelt und synchronisiert werden können. Dabei wird der erste EtherCAT-Master in den DC-Einstellungen auf den Master-Modus umgestellt. Der erste DC-fähige EtherCAT-Slave, der an diesem EtherCAT-Master angeschlossen ist, stellt weiterhin die Referenzuhr. Die TwinCAT-Echtzeit dieser Uhr wird frequenzsynchron nachgeführt.
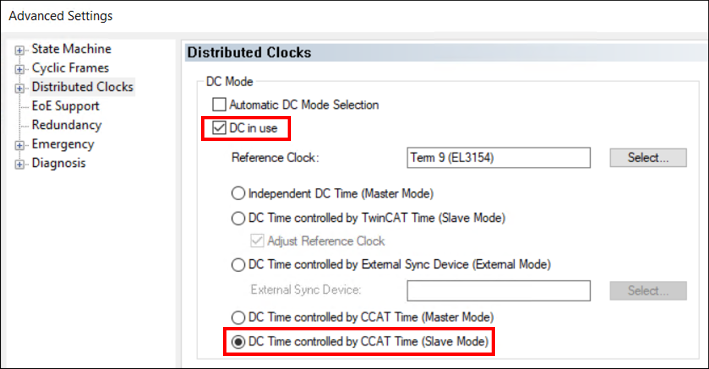
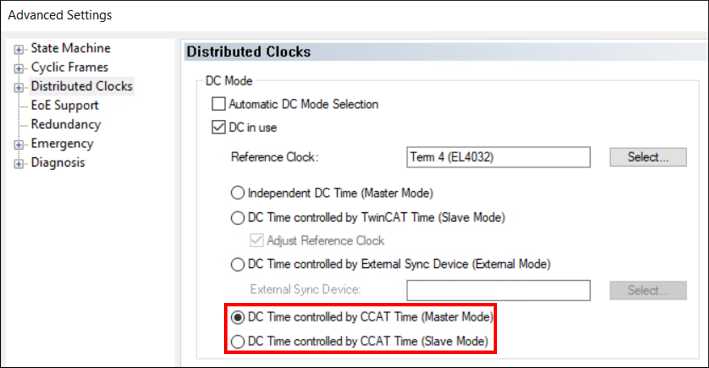 Abb.11: Einstellungen für EtherCAT-Master im Master- oder Slave-Mode.
Abb.11: Einstellungen für EtherCAT-Master im Master- oder Slave-Mode.Die anderen EtherCAT-Master werden mit dem ersten Master synchronisiert und werden dafür auf den Slave-Modus umgestellt. Diese EtherCAT-Master behalten weiterhin ihre lokale Referenzuhr zur Synchronisierung der nachfolgenden Teilnehmer. Diese Referenzuhr wird während des EtherCAT-Starts und später auch fortlaufend der TwinCAT-Zeit nachgeführt und im Folgenden als nachgeführte Referenzuhr bezeichnet.
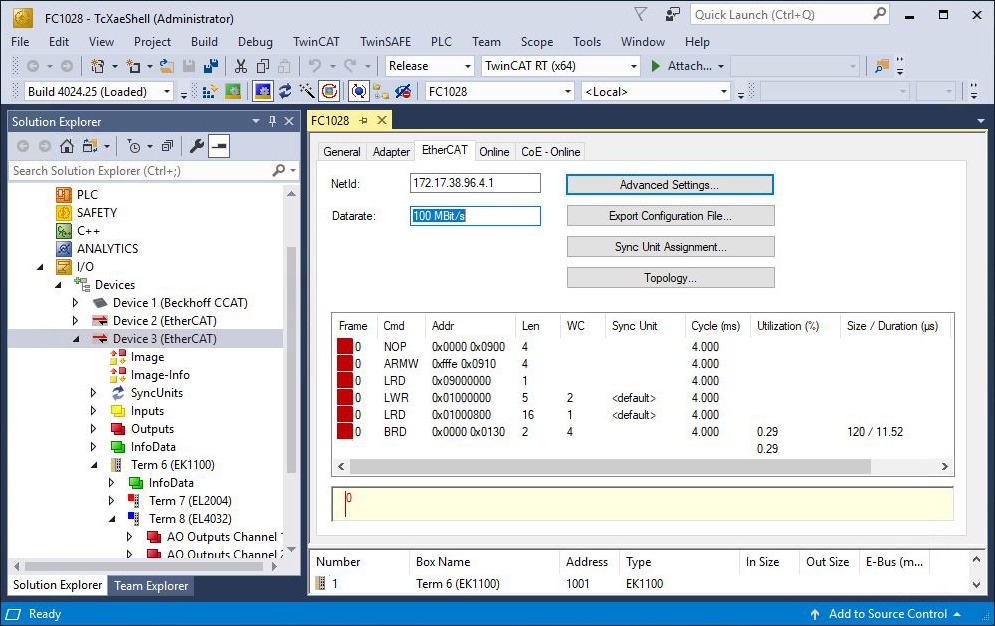
 Abb.12: Beispielkonfiguration mit gekoppelten EtherCAT-Mastern.
Abb.12: Beispielkonfiguration mit gekoppelten EtherCAT-Mastern.Weitere Informationen finden Sie unter: https://download.beckhoff.com/download/Document/io/ethercat-terminals/ethercatsystem_en.pdf
Gehen Sie wie folgt vor:
- 1. Aktivieren Sie für alle EtherCAT-Master die Distributed-Clocks, die Sie untereinander synchronisieren wollen (siehe: Distributed-Clocks aktivieren).
- 2. Aktivieren Sie für jeden dieser EtherCAT-Master eine Referenzuhr.
- 3. Klicken Sie beim ersten EtherCAT-Master links in der Strukturansicht auf den EtherCAT-Master und anschließend unter der Registerkarte EtherCAT auf die Schaltfläche Advanced Settings.
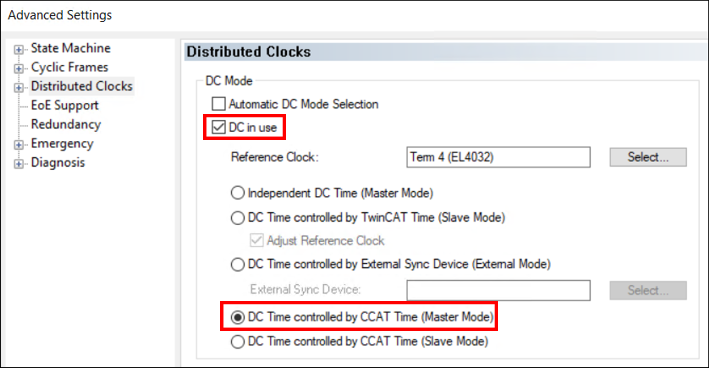
- 4. Deaktivieren Sie die Option Automatic DC Mode Selection.
- 5. Aktiveren Sie unter Distributed Clocks die Option DC in use und zusätzlich die Option DC Time controlled by CCAT Time (Master Mode)
Mit diesem EtherCAT-Master werden alle nachfolgenden EtherCAT-Master synchronisiert. - 6. Für alle nachfolgenden EtherCAT-Master, die Sie mit dem ersten Master synchronisieren möchten, aktiveren sie unter Distributed Clocks die Option DC in use und anschließend die Option DC Time controlled by CCAT Time (Slave Mode).
- 7. Wiederholen Sie diese Einstellung für alle weiteren EtherCAT-Master.
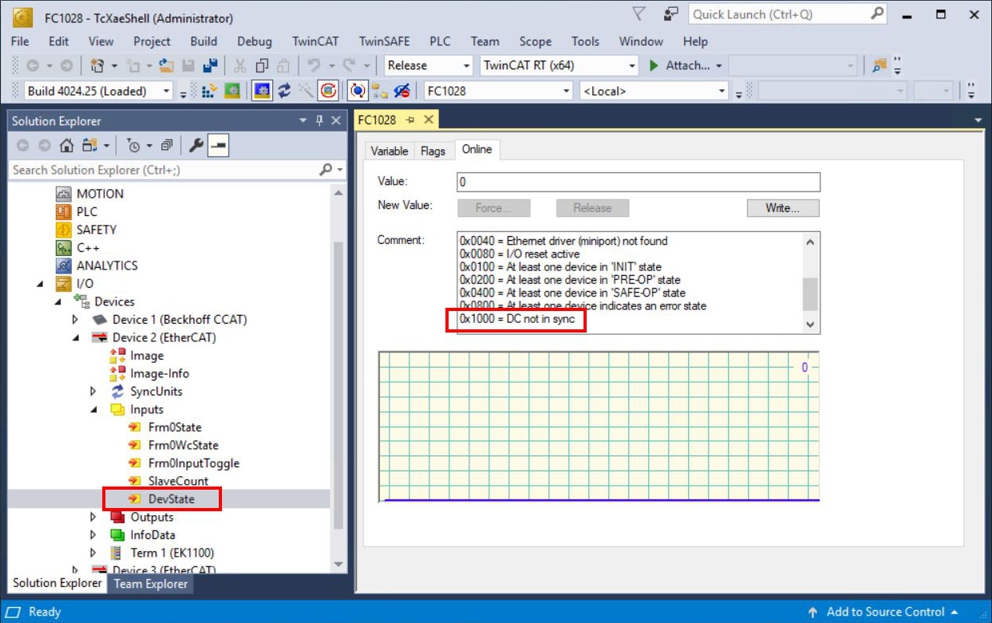
- Die Synchronisierung ist erfolgreich, wenn die Distributed-Clocks-Teilnehmer in den unterlagerten Systemen in den OP-State wechseln. Zusätzlich zeigt die Variable DevState den Status der Distributed-Clock-Kommunkation an.