Default-Einstellungen und Angaben
Prozessdaten Info
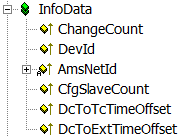
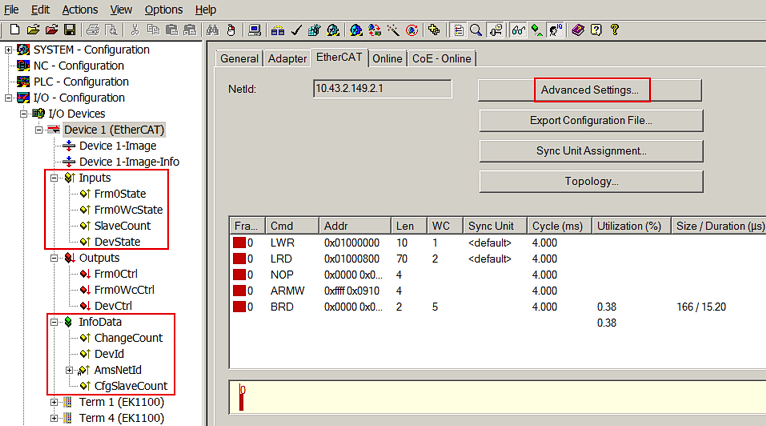 Abb.167: Prozessdaten
Abb.167: ProzessdatenDer EtherCAT Master verfügt über Infodaten die zyklusaktuell eine Diagnose liefern (gelbe Variablen) und allgemeine Info außerhalb des Echtzeitkontext (grüne Variablen). Die wichtigsten im Folgenden:
- DevState: soll = 0 sein, dann sind alle Slaves im OP, kein Link Fehler etc.
- Frm0WcState: soll ebenfalls =0 sein. Für jeden zyklischen Ethernet-Frame wird eine solche Variable angelegt (Frm0WcState, Frm1WcState, ...)
Eine Anwendung soll mindestens diese beiden Master-Inputs zyklusaktuell prüfen und überwachen. - AmsNetId: diese AMS-Adresse benötigt die Applikation (PLC, externe Task) um über ADS den EtherCAT Master bzw. die unterlagerten Slaves anzusprechen
Über die Erweiterten Einstellungen/AdvancedSettings sind weitere Einstellungen zugänglich:
Master Settings
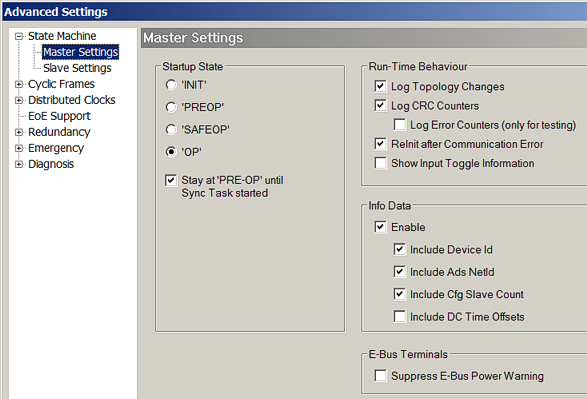 Abb.168: Master Settings
Abb.168: Master SettingsElement | Detail | Erklärung | Auswirkungen |
|---|---|---|---|
StartUp State |
| Sobald TwinCAT "gestartet" wird (RUN oder COnfig/FreeRun) wird der Master in den hier gewählten State gesetzt. Es wird allerdings mit dem Übergang nach OP gewartet, bis die Sync-Task gestartet ist. Bei mehreren Tasks auf einem System ist die höchstpriore die Sync-Task, die auch die Distributed-Clock-Regelung beinhaltet. DC-fähige Slaves lassen sich jedoch nicht in OP schalten, wenn ihre lokale Clock nicht eingeregelt ist bzw. sie fallen wieder aus dem OP-state wenn die Regelung misslingt ("Sync lost"). | Es wird empfohlen, den EcMaster State aus der Applikation (PLC, so vorhanden) zu setzen und zu überwachen (FB_EcGet/SetMasterState aus TcEtherCAT.lib). Dadurch kann der Master auch nach schwerwiegenden Kommunikationsfehlern wieder in den OP gesetzt werden. |
Run-Time Behaviour | Log Topology Changes | Standardmäßig aktiviert Online-Ausgaben im Loggerfenster werden aktiviert | Deaktivierung nicht sinnvoll |
| Log CRC Counters | Standardmäßig aktiviert; es werden im OnlineView die CRC-Fehler der Slaves aus dem Feld ausgelesen und kumuliert gesammelt.
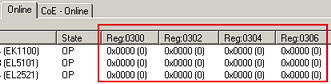
| Wenn im Online View die CRC-Registerzähler in den Slaves gezielt angezeigt werden sollen, ist diese Option zu deaktivieren - sie löscht nämlich nach dem Auslesen die lokalen Register x0300ff damit diese nicht bei xFF vollaufen.
|
| Log Error Counters | keine Funktion |
|
| ReInit after Communication Error | Nach einem Kommunikationsfehler bei dem der Master den OP-state verlassen hat (Verbindung getrennt und >10 Zyklen lang Lost Frames, Stationen abgeschaltet), versucht TwinCAT den Master wieder in den OP-State zu versetzen. | Wenn der EcMaster State aus der Applikation gesteuert wird, muss diese Option unbedingt deaktiviert werden, da sich sonst beide Mechanismen behindern können. Beide greifen über ADS auf den Master zu. |
| Show Input Toggle Information | Wenn aktiviert, wird bei Eingangsklemmen eine zusätzliche Toggle-Variable eingeblendet die verlinkt werden kann. Sie ändert ihren Zustand 0/1 bei jedem neu empfangenen Datagramm. |
|
Info Data |
| Das Einblenden dieser (grünen) Nicht-Echtzeit Informationsdaten im System-Manager-Baum kann hier deaktiviert werden. | DeviceId: nützlich für den Zugriff aus der Applikation AdsNetId: nötig für den Zugriff aus der Applikation CfgSlaveCount: Anzahl der bisherigen Konfigurationsänderungen Dc Time Offsets: die zur Laufzeit konstanten Offsets zwischen externer, interner und TwinCAT Clock werden eingeblendet. Nötig für die externe EtehrCAT Synchronisierung. |
Ebus Power Warning |
| Standardmäßig warnt der System Manager vor Überschreitung der max. Belastung eines EtherCAT Kopplers (z. B. EK1100). |
|
Slave Settings
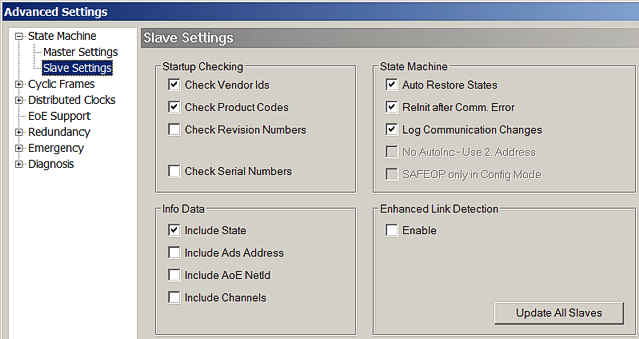 Abb.169: Slave Settings
Abb.169: Slave SettingsElement | Detail | Erklärung | Auswirkungen |
|---|---|---|---|
StartUp Checking |
| Beim Hochlauf von EtherCAT werden die hier aktivierten Eigenschaften aller Slaves überprüft. Entsprechende Settings in den Slaves gehen allerdings vor! | Standardmäßig werden VendorID und ProductCode (z. B. El2521-0010) geprüft. Dies wird empfohlen, denn dadurch können weiterentwickelte aber typgleiche Geräte mit höherer Revision im Austauschfall eingesetzt werden. |
State Machine | Auto Restore States | Wenn der Slave aus eigenen Gründen (Energieverlust, Synchronisierungsfehler) den OP-State verlassen hat, versucht der EtherCAT Master bei aktivierter Checkbox den Slave wieder in den OP-State bzw. den zuletzt regulär erreichten State zu setzen. | Es wird empfohlen, den Slave State State aus der Applikation (PLC, so vorhanden) zu setzen und zu überwachen (FB_EcGet/SetMasterState aus TcEtherCAT.lib). Dadurch kann die Applikation den Slave in Übereinstimmung mit applikationsspezifischen Erfordernissen ansteuern. Beispiel Servoachse: der EtherCAT Master würde die Achse sobald möglich einfach wieder in den OP-State setzen, ohne tiefere Kenntnis über Sicherheits- oder Funktionszusammenhänge. Die Applikation hingegen kann entscheiden, ob diese Achse nach dem schweren Fehler "State Ausfall" überhaupt und wann wieder in den OP-State gesetzt werden darf. Des weiteren kann ein DeadLock eintreten: wird der Slave vom Master neu in den OP gesetzt, erreicht aber nur SAFEOP und wird dann bereits wieder gestört, wird der Master im Weiteren nur noch versuchen den Slave in den SAFEOP-State zu setzen, er wird den OP-nicht mehr erreichen. Deshalb wird eine Ansteuerung von Master- und Slave-State durch die Applikation empfohlen. |
| ReInit after Comm.Error | Wenn die Kommunikation zu einem Slave unterbrochen wurde, startet der Master den Slave bei wiederhergestellter Verbindung neu durch den INIT-State, auch wenn der Slave für sich nur in den SAFEOP-State zurückgefallen ist. Dadurch wird ein sicherer Hochlauf und eindeutiger Zustand des Slaves erzielt. | Bei einem Neustart eines Slaves INIT --> OP fallen i.d.R. die Ausgänge ab. |
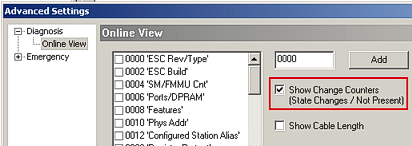
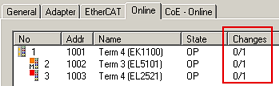
| Log Communication Changes | Standardmäßig aktiviert; wird im Online View die Option "Show Change Counter" aktiviert, werden die State-Wechsel angezeigt.
| Deaktivierung nicht sinnvoll |
Info Data |
| Das Einblenden dieser (grünen) Nicht-Echtzeit Informationsdaten im System-Manager-Baum kann hier (de)aktiviert werden. | Das Einblenden der ADS-Adresse in jedem Slave ist z. B. nützlich für die Verlinkung mit einem slavespezifischen FUNCTIONBLOCK, der einen Slave überwachen soll. |
Enhanced Link Detection |
| Diese Funktion ist nicht für den allgemeinen Gebrauch bestimmt. | Wird diese Funktion auf EtherCAT Geräte angewendet, die dies nicht unterstützen kann zur dauerhaften und irreversiblen Störung der EtherCAT Kommunikation kommen. Bei Geräten, die diese Funktion unterstützen, ist diese Funktion bereits herstellerseitig durch die in der Produktion aufgespielte ESI aktiviert. |
Sync Task
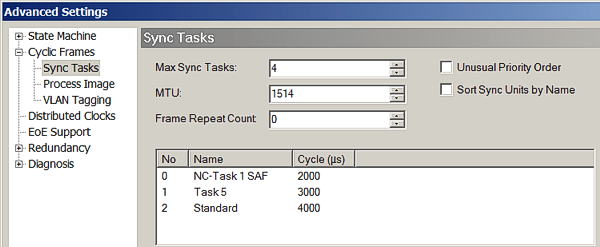 Abb.170: Sync Task
Abb.170: Sync TaskElement | Erklärung |
|---|---|
Max Sync Task | TwinCAT 2.10/2.11 unterstützt max. 4 SyncTasks. Eine SyncTask ist eine Task (PLC, NC) die ein I/O-Update antriggert, also mit eigenen EtherCAT-Frames in zyklischer und fester Zykluszeit mit dem I/O-Feld kommuniziert. In Abb. Sync Task. sind in der Konfiguration 3 Tasks in Gebrauch mit Zykluszeiten von 2, 3 und 4 ms. In der Taskpriorisierung ist auf richtige Reihenfolge entsprechend zu achten. Sind mehr als 4 Tasks in der Konfiguration vorhanden, werden von großen Zykluszeiten her die Tasks in die langsamste Task gesetzt. TIPP: Dies kann genutzt werden, wenn eine sehr langsame PLC-Task > 100 ms genutzt werden soll, die I/O-Kommunikation aber wegen dem Slave-Watchdog schneller betrieben werden muss .Dann ist die Anzahl "Max Sync Task" soweit zu reduzieren, bis nur noch Tasks <100 ms übrigbleiben. |
MTU | Die "Max Transfer Unit " (MTU) ist die maximale Byte-Länge eines Ethernet-Frames mit EtherCAT Datagrammen. |
Frame Repeat Count | Der TwinCAT EtherCAT Master unterstützt das Mehrfach-Senden von EtherCAT Frames zum Zwecke der erhöhten Störsicherheit. |
Distributed Clocks
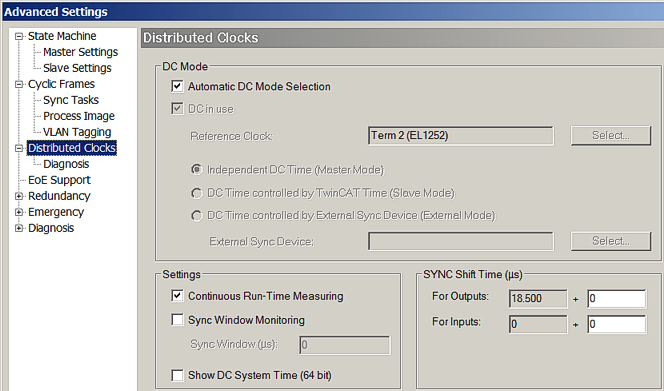 Abb.171: Distributed Clocks
Abb.171: Distributed ClocksDiese Einstellungen werden in einem besonderen Kapitel besprochen.
EoE Support (Ethernet over EtherCAT)
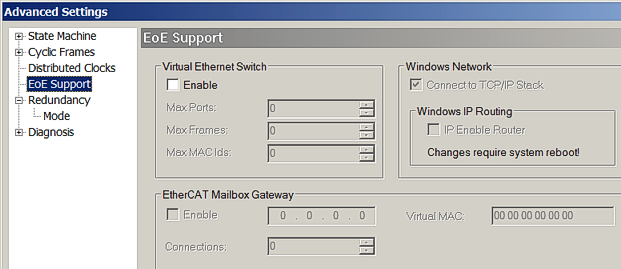 Abb.172: Ethernet over EtherCAT Support
Abb.172: Ethernet over EtherCAT SupportElement | Detail | Erklärung | Auswirkungen |
|---|---|---|---|
Virtual Ethernet Switch |
| Die Durchleitung von Standard TCP/IP-Verkehr über den virtuellen Switch innerhalb des TwinCAT-EtherCAT-System wird in diesen Einstellungen automatisch abhängig von den verwendeten Slaves gesetzt. EL6601 (SwitchPort-Klemmen) z. B. führen hier zu einer Aktivierung des VirtualEthernetSwitch und Hinzufügung von Ports. (s. Abb. „Aktivierung des VirtualEthetnetSwitch“) Weiterführende Hinweise sind deshalb den entsprechenden Klemmendokumentationen (EL6601, EL6614) zu entnehmen. | Die ausdrückliche Aktivierung und Vorgabe von Ports ist nötig, wenn z. B. zu einem intelligenten Antrieb über EoE zur Parametrierung oder Firmware-Update kommuniziert werden soll. Dann ist für jedes angeschlossene Gerät ein Port anzulegen. Die Anzahl "Max.Frames" stellt die interne Queue dar und kann erhöht werden, wenn es zu Durchsatzproblemen kommt. In diesem Fall ist allerdings zuerst die verwendete EtherCAT-Zykluszeit und die Mailbox-Größen zu prüfen. Siehe dazu ebenfalls die EL6601-Dokumentation. |
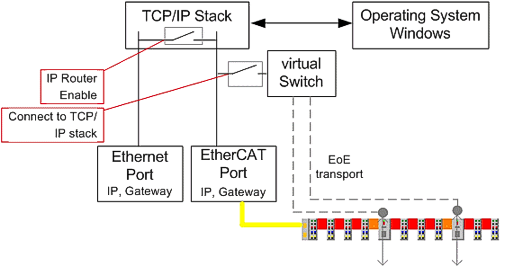 Abb.173: Aktivierung des VirtualEthetnetSwitch
Abb.173: Aktivierung des VirtualEthetnetSwitchElement | Detail | Erklärung | Auswirkungen |
|---|---|---|---|
Windows Network | IP Routing | Siehe dazu das vorangehende Bild. |
|
EtherCAT Mailbox Gatway |
| Diese Einstellung wird für spezielle Slaves benötigt. |
|
Cable Redundancy
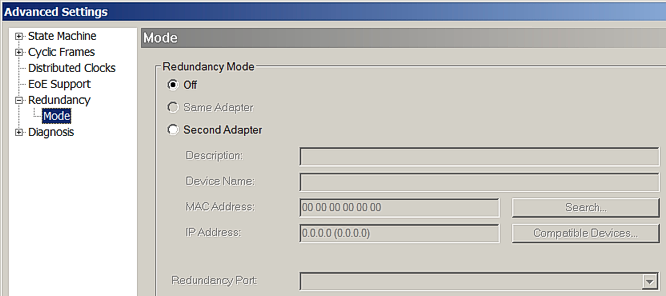 Abb.174: EtherCAT Kabelredundanz
Abb.174: EtherCAT KabelredundanzIm gesonderten Kapitel Kabel-Redundanz werden die Optionen zur Medienredundanz besprochen. Zur Nutzung ist eine TwinCAT Supplement Lizenz erforderlich.
Wird hier ein Ethernet-Port eingetragen (Installation Realtime-Treiber, siehe hier) kann diese Konfiguration nicht in den RUN-State versetzt werden, wenn die Lizenz fehlt.
Sync Unit Zuordnung
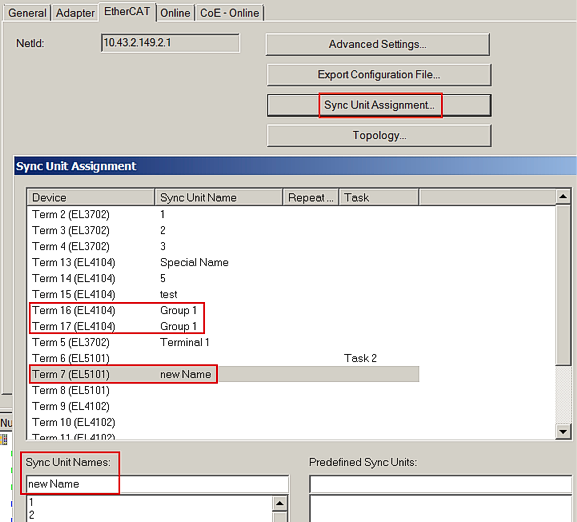 Abb.175: Sync Unit Zuordnung
Abb.175: Sync Unit ZuordnungDie Sync-Unit-Zurodnung betrifft nur die zyklischen Daten des EtherCAT Systems.
Der System Manager nimmt standardmäßig eine sehr effiziente Zuordnung von zyklischen I/O-Daten und versendeten Datagrammen vor. Das bedeutet, es werden möglichst viele/alle zyklischen Daten in einen/wenige Datagramme gepackt. Dadurch ergibt sich eine geringe Buslast dank wenig Telegramm-Overhead. Mit wenigen, im besten Fall einem Datagram werden möglichst viele, im besten Fall alle Slaves angesprochen.
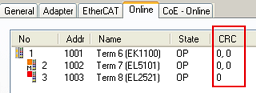
Ein Diagnosemittel im EtherCAT System ist der Working-Counter. Jeder Slave, der auftragsgemäß ein Datagram bearbeitet (Daten hineinschreibt oder herausliest) erhöht den so genannten WorkingCounter (WC). Der Master schickt die Datagramme mit WC=0 los und erwartet sie mit WC>0 zurück. Anhand der WC-Überprüfung kann der Master sofort feststellen, ob alle angesprochenen Slaves das Datagram korrekt bearbeitet haben - ist dies nicht der Fall, kann der Master den zurück gelieferten Daten nicht trauen und er verwirft alle Inputdaten aus diesem Datagram. Darüber hinaus beginnt er mit azyklischen Diagnosemaßnahmen zur Feststellung des Fehlerortes.
Wird in einer Anlage mit Auftreten von Working-Counter-Fehlern gerechnet, z. B. weil das flexible Topologiekonzept "HotConnect" genutzt wird, können Koppler-Baugruppen oder einzelne Slaves/Klemmen in diesem Dialog in eigene Datagrame gelegt werden, den sog. SyncUnits. Im Extremfall erhält jeder Slave ein eigenes Datagram, dies bedeutet eine sehr ineffiziente Busausnutzung da viele Datagramme und Ethernet-Frames mit entsprechenden Overhead versendet werden müssen. Hinweis: Ein Ethernet-Frame kann max. 16 EtherCAT Datagramme beinhalten.