Technische Einordnung
Die Anwendungs- und Kommunikationseigenschaften eines Beckhoff IO-Geräts (EtherCAT Klemme EL/ES/EM/EK, EtherCAT Box EP/EQ, Sonderbauformen CU) werden durch folgende 3 Elemente bestimmt: das Gerät, die Firmware (optional) und die EtherCAT Slave Gerätebeschreibung (ESI).
Ein elektronisches Automatisierungsgerät mit Feldbusanschluss besteht noch aus vielen weiteren (internen) Komponenten, Software und Bauteilen wie z. B. der ESC (EtherCAT Slave Controller, der Realtime Kommunikations-IC), die 3 oben genannten sind jedoch diejenigen, die das Gerät nach außen hin in seinen Eigenschaften für den Anwender definieren.
Im Einzelnen zu den 3 Elementen:
Das materielle Gerät selbst, die "Hardware" (HW)
- wird durch Beckhoff gekennzeichnet durch den Hardwarestand z. B. HW01.
- im EtherCAT-Sprachgebrauch wird das Gerät auch oft als Slave im Sinne der Feldbustopologie bezeichnet, weil es vom EtherCAT Master angesprochen wird.
- der Hardwarestand.
- wird außen auf das Gerät gedruckt, siehe Seriennummer/Batch-Nummer
- ist bei Geräten mit CoE-Verzeichnis dort auslesbar
- ist seit 2012/01 durch den EtherCAT Master aus dem EtherCAT/ESI-EEPROM auslesbar
- wird je nach Gerätebaureihe dezimal oder hexaddezimal codiert
Die ggf. darauf laufende Firmware
- Hinweis: als Firmware (FW) wird der ausführbare und vom Hersteller (Beckhoff) erstellte Programmcode bezeichnet der auf einem µC (Microcontroller, FPGA oder Prozessor) ausgeführt wird. Nicht jedes Gerät (Device) muss zwingend über einen µC und damit eine Firmware verfügen!
- diese kann ggf. aus mehreren Dateien bestehen und muss auf das IO-Gerät aufgespielt werden. Üblicherweise sind das *.efw oder *.rbf-Dateien
- wird durch Beckhoff gekennzeichnet durch den Firmwarestand z. B. FW02
- der Firmwarestand
- wird außen auf das Gerät gedruckt, siehe Seriennummer/Batch-Nummer.
- ist bei Geräten mit CoE-Verzeichnis dort auslesbar.
- ist seit 2012/01 durch den EtherCAT Master aus dem ESI-EEPROM auslesbar.
- falls ein Firmware-Update des Gerätes vorgenommen wird, ist der Aufdruck am Gehäuse durch den Ausführenden /Anwender entsprechend anzupassen.
Die EtherCAT ESI Kommunikationsbeschreibung als Gerätebeschreibungsdatei für den EtherCAT Master (bei Beckhoff: in die TwinCAT-Software integriert)
- beschreibt die EtherCAT Kommunikationsschnittstelle zwischen Gerät und Master in allen Aspekten die für Datenkommunikation und Synchronisierung relevant sind
- wird einerseits durch Beckhoff auf das IO-Gerät selbst programmiert (in das sog. EtherCAT/ESI-EEPROM)
- damit das Gerät beim Scannen durch den EtherCAT Master Grundinformationen von sich aus bekannt geben kann: Prozessdatenumfang (PDO), Einstellungsmöglichkeiten (CoE) und weiteres.
- außerdem beinhaltet diese ESI die Grundeinstellungen für das IO-Gerät selbst die für die Funktion relevant sind und beim PowerOn vom µC oder anderen Steuerkomponenten auf dem Gerät eingelesen werden.
- sollte andererseits dem EtherCAT Master als Datei vorliegen
- da die EtherCAT-Master-Software nun den Slave auch ohne elektrischen Zugriff "kennt", kann der der Anwender seine Buskonfiguration auch „offline“ erstellen, d.h. ohne live Kontakt zu dem IO-Gerät, wie es beim Scannen zwingend nötig ist.
- und außerdem ist dem EtherCAT Master dadurch bekannt, wie er den Slave über EtherCAT ansprechen muss und welche Funktionen dieser bietet. Dadurch sind für den Master z. B. zyklische Prozessdaten und CoE-Verzeichnis des Slaves bestimmt. Ohne ESI-Datei kennt der Master das Gerät schlichtweg nicht.
- Wenn in TwinCAT ein EtherCat Slave mit der NC verknüpft werden soll, ist zwingend das Vorliegen der ESI Gerätebeschreibungsdatei erforderlich
- Hinweis: es gibt EtherCAT Master, die die Geräteinformationen nur durch den Scan-Vorgang aus dem Slave gewinnen und keine ESI-Datei vom Gerät benötigen.
Auch TwinCAT kann notfalls "online" ohne vorliegende ESI-Datei arbeiten, für TwinCAT ist allerdings das Vorliegen der korrekten ESI-Datei dringend empfohlen und zwar aus einem einfachen Grund: viele EtherCAT Geräte verfügen mittlerweile über einen großen Funktionsumfang und umfangreiche Einstellmöglichkeiten. Dies resultiert dann in einer großen ESI-Datei die u.U. nicht mehr vollständig im lokalen EtherCAT/ESI-EEPROM gespeichert werden kann - die dann dort vorliegenden reduzierten Informationen reichen dann zwar für einen Grundbetrieb des Gerätes aus, der volle Funktions- und Diagnoseumfang des Geräts ist dann aber nicht verfügbar.
Außerdem ist nur bei Vorliegen der ESi-Datei eine Offline-Konfiguration möglich. - wird durch Beckhoff gekennzeichnet durch die sog. Revision z. B. -0018
wenn es zu inhaltlichen/funktionellen Änderungen in der ESI kommt, wird in der Regel der Revisionsstand +1 erhöht - die Revision
- ist vom EtherCAT Master aus dem EtherCAT/ESI-EEPROM auslesbar.
- ist bei Geräten mit CoE-Verzeichnis ebenfalls dort auslesbar.
- wird seit 2014/01 außen auf das Gerät gedruckt →"Rev. xxxx"
- falls ein Revision-Update des Gerätes vorgenommen wird, ist der Aufdruck am Gehäuse durch den Ausführenden/Anwender entsprechend anzupassen (wenn vorhanden).
Alle 3 Elemente können durch ihre Eigenschaften Einfluss haben auf
- funktionale Eigenschaften z. B. Filter, SampleRate, Ausgabegeschwindigkeit, Eingangsempfindlichkeit u.a.
- zeitliches Verhalten z. B. beim Hochlauf,
- Verhalten und Diagnose im Fehlerfall
- Kommunikationseigenschaften z. B. Prozessdaten, Parameterverzeichnis,
- Distributed Clocks Eigenschaften z. B. Triggerarten, Synchronität, Latenz u.a.
- äußeres Erscheinungsbild
Diese 3 Elemente sind wie folgt in der Applikationswelt wieder zu finden:
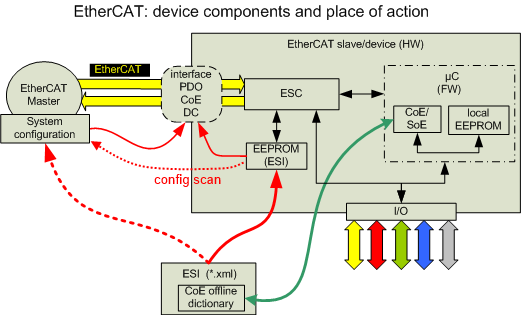 Abb.42: Komponenten des EtherCAT-Geräts
Abb.42: Komponenten des EtherCAT-GerätsErläuterung dazu in Anlehnung an die oben erwähnten Grundlagen:
- die ESI ist im Device einprogrammiert (EtherCAT/ESI-EEPROM) und bestimmt das EtherCAT Interface aus Sicht des µC, die EtherCAT Echtzeitkommunikation übernimmt der ESC (EtherCAT Slave Controller).
- der EtherCAT Master benötigt die ESI um sie z. B. in seine SystemConfiguration einzuarbeiten. Er kann dazu online das EtherCAT/ESI-EEPROM auslesen. Falls ihm allerdings die ESI direkt als Datei vorliegt, ist auch eine Offline-Konfiguration möglich.
Dadurch haben nun Master und Slave/Gerät die gleiche Definition der EtherCAT Schnittstelle/Interface und können miteinander kommunizieren. - der µC (falls vorhanden) bildet die Funktion des Gerätes ab und kommuniziert dazu mit dem ESC. Er kontrolliert auch die IO-Seite des Gerätes, falls dies nicht bereits der ESC übernimmt.
- das Parameterverzeichnis "CoE" (CANopen-over-EtherCAT) des Gerätes wird vom µC verwaltet, also "online". Die ESI-Datei enthält auch eine Kopie davon, das sog. "CoE offline dictionary". Damit ist der Anwender in der Lage, bereits offline die möglichen Funktionen einzusehen und ggf. über die StartUp-Liste vorzukonfigurieren.
Änderungen im Online-CoE werden bei Beckhoff-IO-Geräten und dem AX2000 im Allgemeinen in einem lokalen EEPROM stromausfallsicher gespeichert (wenn nicht anders parametriert). Der AX5000 verfügt dagegen über ein SoE-Verzeichnis (Sercos-over-EtherCAT) das beim PowerOn immer im Default-Zustand startet, anwenderseitig erforderliche Änderungen sind bei jedem Hochlauf vom EtherCAT Master z. B. per StartUp-Liste in den Slave zu laden.
Vereinfacht dargestellt bilden diese 3 Elemente das gesamte Gerät ab wobei die ESI sowohl im Gerät wie auch im Master Verwendung findet:
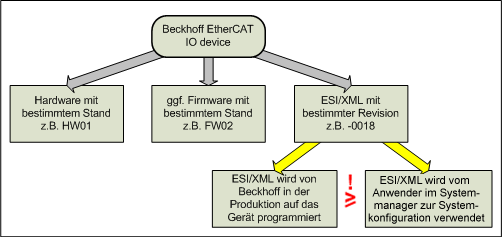 Abb.43: Vereinfachte Darstellung des gesamten EtherCAT-Geräts
Abb.43: Vereinfachte Darstellung des gesamten EtherCAT-GerätsDas gesamte Gerät kann je nach Typ auch mit einer fortlaufenden, eindeutigen Gerätenummer gekennzeichnet sein. Siehe dazu die Indentifizierungshinweise.