EtherCAT Distributed Clocks - Kopplung von EtherCAT-Systemen
Ein EtherCAT System mit Distributed-Clocks-Nutzung weist folgende Eigenschaften auf:
- es wird an der Steuerung/IPC ein Ethernet Port benutzt
Hinweis: bei Kabelredundanz werden zwei Ethernet Ports benutzt; die Kombination von Distributed Clocks (DC) und Kabelredundanz ist jedoch nur mithilfe des Gerätes CU2508 möglich, s. entsprechende Gerätedokumentation. - bis zu 65535 Slaves werden an diesem Port von einem Realtime-EtherCAT Master zyklisch/azyklisch mit Prozessdaten versorgt.
- der erste DC-fähige EtherCAT Slave im System stellt die ReferenceClock (Abb. Topologie Distributed Clocks System: "M") dar, nach der alle nachfolgenden Slaves synchronisiert werden (Abb. Topologie Distributed Clocks System: "S")
- um die Echtzeit synchron zu dem DC-Umfeld zu halten, wird die interne TwinCAT Echtzeit Uhr ebenfalls dieser Feld-ReferenceClock nachgeführt.
Es kann also nur eine Referenzuhr an einer TwinCAT Steuerung geben, die die TwinCAT Echtzeit synchronisiert. Alle anderen EtherCAT Systeme müssen sich bzw. ihre lokale ReferenceClock nachregeln. Trotzdem behalten alle EtherCAT Systeme ihre lokale ReferenceClock im jeweils ersten DC-EtherCAT-Slave. Darauf ist in den folgenden Einstellungen Rücksicht zu nehmen.
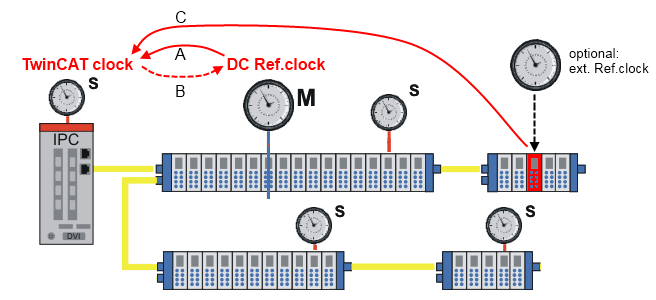 Abb.293: Topologie Distributed Clocks System
Abb.293: Topologie Distributed Clocks SystemIn den erweiterten Einstellungen des EtherCAT Masters kann die Synchronisierungsrichtung eingestellt werden.
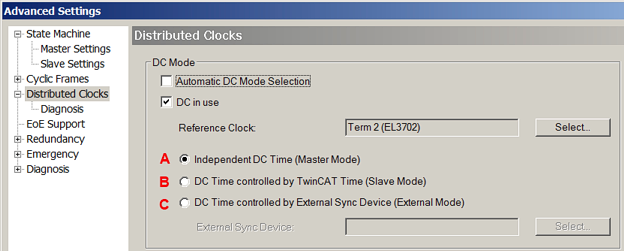 Abb.332: Synchronisierungsrichtung
Abb.332: SynchronisierungsrichtungWird mehr als ein EtherCAT System auf einer TwinCAT Steuerung verwendet, ist also mehr als ein "EtherCAT Device" in der I/O-Konfiguration enthalten und benutzen einige oder alle davon Distributed-Clocks-Funktionen, ist wie folgt vorzugehen:
- ein System wird in den DC-Einstellungen auf "Independent mode" gesetzt.
In diesem System sitzt eine ReferenceClock in einem Slave und regelt alle anderen Slaves in diesem System nach. Ebenso wird die TwinCAT Echtzeit dieser Uhr frequenzsynchron nachgeführt. - alle anderen DC-Systeme sind auf "Slave-Mode" zu stellen.
In diesen Systemen sitzen ebenfalls die lokalen ReferenceClocks zur Synchronisierung der nachfolgenden Teilnehmer. Allerdings wird diese ReferenceClock während des EtherCAT Starts und später auch fortlaufend der TwinCAT Zeit nachgeführt und im Folgenden als "nachgeführte ReferenceClock" bezeichnet.
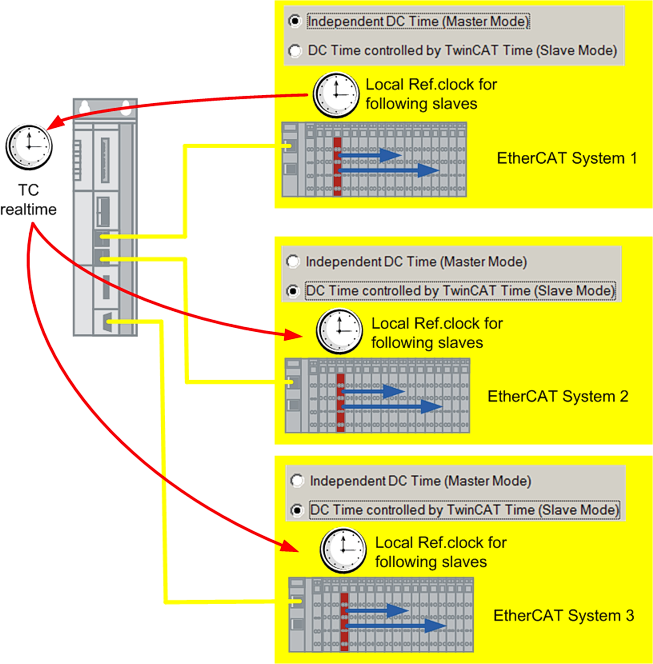 Abb.333: DC-Kopplung EtherCAT-Systemen
Abb.333: DC-Kopplung EtherCAT-Systemen | Hinweise
|
Nachführungsgenauigkeit
Wie in Abb. DC-Kopplung EtherCAT-Systemen ersichtlich muss eine Kette von Synchronisierungen bis zur "nachgeführten ReferenceClock" über die TwinCAT Steuerung durchgeführt werden. Dadurch wird nur eine reduzierte Regelungsgenauigkeit der EtherCAT-Systeme untereinander erreicht. Es ist in der Anwendung zu prüfen, ob dieser Ansatz langfristig den applikativen Ansprüchen an Regelungsgenauigkeit und Stabilität genügt.
Für höchste Synchronisierungsgenauigkeit entwickelt ist der Port-Multiplier CU2508. Er unterstützt bis zu 8 angeschlossene EtherCAT-Systeme bzw. 4 mit gleichzeitiger Kabelredundanz. Er ermöglicht auch die Kombination von Distributed-Clocks-Funktion und Kabelredundanz. In der Konfiguration ist der CU2508 transparent, es sind also weiterhin eigenständige EtherCAT Devices in der Konfiguration sichtbar.
Weitere Information siehe die Dokumentation CU2508.
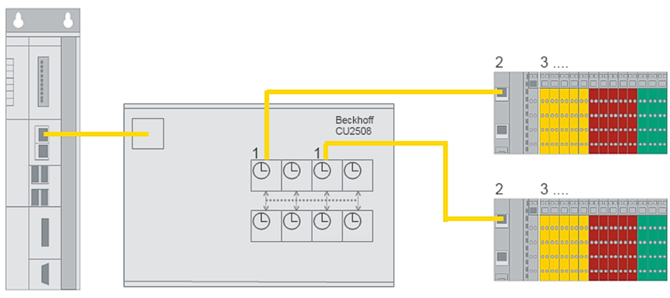 Abb.334: EtherCAT Topologie mit CU2508 und 2 EtherCAT Systemen
Abb.334: EtherCAT Topologie mit CU2508 und 2 EtherCAT Systemen