EtherCAT-Datenaustausch
Wenn zwischen zwei EtherCAT-Systemen direkter synchroner Datenaustausch erforderlich ist, stehen verschiedenen Komponenten zur Realisierung zur Auswahl. Je nach Anforderungen kann für die Applikation die richtige Methode nach den folgenden Kriterien ausgewählt werden. Unterscheidungsmerkmale sind:
- synchroner Datenaustausch mit vordefinierten, in der Konfiguration festgelegten Prozessdaten
- asynchroner Datenaustausch
- Unterstützung für ADS over EtherCAT (AoE)
- Unterstützung für Synchronisierung der Distributed Clocks (DC) der beiden Systeme untereinander
In der folgenden Tabelle sind einige Charakteristika aufgeführt. Diese Angaben können nur Anhaltspunkte sein, maßgeblich ist die jeweilig online verfügbare Komponentendokumentation!
| EL6692 | Publisher / Subscriber | EL6601 | FC1100 | CX50x0-B110 |
|---|---|---|---|---|---|
max. synchroner Datenumfang | 480 Byte, bidirektional | beliebig viele | 1024 Byte, bidirektional (Publisher / Subscriber-Verfahren) | 1024 Byte, bidirektional |
|
max. asynchroner Datenumfang | - | - | beliebig viele | - |
|
Unterstützung AoE | ja | ja | - | ja | ja |
Unterstützung DC | ja | - | - | - | - |
Hinweis |
|
|
|
|
|
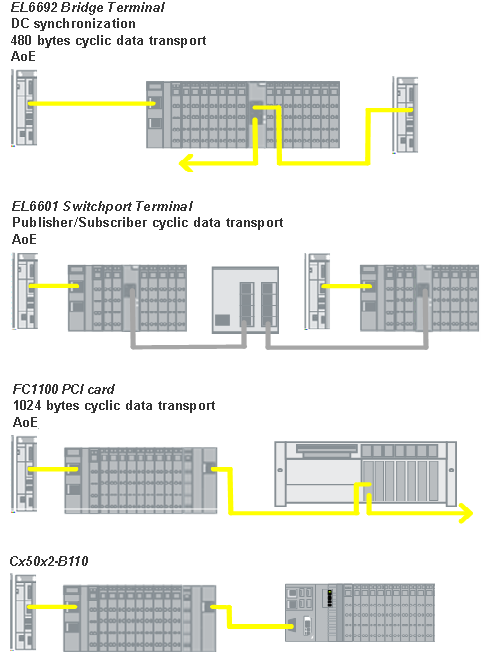 Abb.249: Topologien verschiedener Datenaustauschverfahren
Abb.249: Topologien verschiedener Datenaustauschverfahren