Adressierung
Addressierung und Identifizierung
Es sind drei verschiedenen Verfahren zur eindeutigen Identifizierung von Hot-Connect-Stationen definiert:
- SecondSlaveAdress (SSA)
Hierbei wird die Stationsadresse [0..65536] fest im E²PROM des EtherCAT-Slave gespeichert. Beim Start lädt der EtherCAT-Slave-Controller (ESC) diese Adresse in sein Register 0x0012, von wo es vom EtherCAT Master ausgelesen werden kann.
Geschrieben wird diese Adresse - durch den EtherCAT Master/TwinCAT Systemmanager vom Anwender bei Anlagenerrichtung
- durch eine Bedienoberfläche am Slave (Tastatur, Display, Wahlschalter, ...) bei Geräteinbetriebnahme
- Der Anwendungsfall ist in nahezu allen Fällen nicht die Verwendung als flexible Station sondern die eindeutige Identifizierung eines Gerätes.
Im Austauschfall muss im Ersatzgerät die bisherige Adresse neu hinterlegt werden.
Eine geänderte SSA wird i.d.R. vom ESC erst nach einem Power-Neustart des Gerätes übernommen.
Die SSA kann vom Anwender durch eine Lesen des Registers 0x0012 aus der PLC geprüft werden (siehe TcEtherCAT-lib --> FB_EcPhysicalReadCmd) - InputWord/IdentificationValue/Data Word
Hierbei wird eine der Stationsadresse [0...65535] entsprechende Bitfolge im Prozessdatenbereich eines EtherCAT-Slaves erwartet und vom Master als Stationsadresse interpretiert.
TwinCAT 2.10 erwartet die 16 Bit Daten ab Register 0x1000. Ab TwinCAT 2.11R2 kann die Information an beliebiger Stelle im Slave liegen, durch die ESI-Beschreibung wird der EtherCAT Master vom Speicherort im ESC informiert, im Dialog (s. Abb. Default-Einstellung eines EtherCAT slave der den Identifizierungsmodus DataWord unterstützt) genannt ADO (AdressOffset).
Das InputWord wird i.d.R. in der Konfiguration als Prozessdatum beim unterstützenden Slave dargestellt (siehe EK1501, EK1101). - Explicit Device Identification
Hierbei teilt der Slave dem Master während der Hochlaufphase durch das AL Status Register 0x0134 seine ID [0...65535] auf Anforderung durch den Master mit.
Dieses Verfahren wird ab TwinCAT 2.11R3 unterstützt.
 | Adressierungsmethode Generell ist in der zum EtherCAT Gerät gehörenden ESI-Datei hinterlegt, welche Adressierungsarten der Slave unterstützt. Dies wird im TwinCAT System Manager -> EtherCAT Slave -> Erweiterte Einstellungen angezeigt und sollte im allg. nicht anwenderseitig verändert werden. |
 Abb.205: Default-Einstellung eines EtherCAT slaves, der den Identifizierungsmodus DataWord unterstützt
Abb.205: Default-Einstellung eines EtherCAT slaves, der den Identifizierungsmodus DataWord unterstütztAlle EtherCAT-Slaves werden immer über das Autoincrement-Verfahren initial angesprochen, dann versucht der EtherCAT-Master die konfigurierten Stationsadressen im Feld zu finden und den Stationen/Kopplern zuzuordnen. Dazu wird der abgehende Port gezielt geöffnet und geschlossen, um die IDs zu ermitteln.
Adressvergabe im Slave
Explicit Device Identification
Die ID-Einstellung ist nach Geräte-Anleitung vorzunehmen.
InputWord/IdentificationValue
In der Regel erlaubt bei solchen Slaves ein von außen zugänglicher Wahlschalter die Einstellung der Position, der Wahlschalter kann verplombbar gestaltet oder über einen Softwaremechanismus geschützt werden. Andere Geräte bieten eine Bedienungsoberfläche die die ID-Einstellung erlaubt.
Beispiel: Beckhoff EK1101 - freie Zugänglichkeit der ID-Schalter
 Abb.206: EK1101 mit ID-Switch
Abb.206: EK1101 mit ID-SwitchSecondSlaveAddress
Die SSA kann vom Master oder über eine Bedienoberfläche am Slave gesetzt werden. Im Folgenden die Beschreibung des Setzens über den Beckhoff TwinCAT Master:
- Nehmen Sie den EtherCAT-Slave ohne Adressierung in einer einfachen Konfiguration in Betrieb.
Der Slave sollte im OP sein, WorkingCounter = 0, keine LostFrames - Gehen Sie über
Slave -> EtherCAT -> Advanced Settings -> E²PROM zum Dialog SecondAddress. - Dort wird die aktuelle Adresse angezeigt, schreiben Sie die New Second Address in das Slave E²PROM.
- Nach einem Power-Neustart wird die Adresse übernommen.
- In diesem Beispiel wird die neue Adresse 10dec/0Ahex gesetzt.
 Abb.207: SSA setzen
Abb.207: SSA setzenOb der Slave die Adresse übernommen hat, kann wie folgt überprüft werden:
Gehen Sie im selben Dialog auf Memory und kontrollieren Sie den Inhalt von Register 0x0012.
 Abb.208: Kontrolle der SSA
Abb.208: Kontrolle der SSAWenn nichts angezeigt wird:
- Normalerweise ist Wc=0 der "fehlerfreie" Zustand, in diesem Fall muss WorkingCounter=1 stehen, sonst erfolgt aus anderen Gründen keine Kommunikation mit dem Slave
- Kontrollieren Sie, ob Sie sich auf dem richtigen Slave befinden.
- Wie durch Length=400 ersichtlich, liest der Dialog 400hex Byte in einem Vorgang aus dem ESC. Dies unterstützen die meisten Fremd-ESC nicht, dann werden keine Daten in den Spalten angezeigt.
Versuchen Sie ab Length=2 herauszufinden, wie viele Bytes Ihr ESC unterstützt.
Hinweis TwinCAT 2.11
Der Einstellungsdialog für die SSA wurde in TwinCAT 2.11 leicht verändert, behält aber die gleichen Eigenschaften.
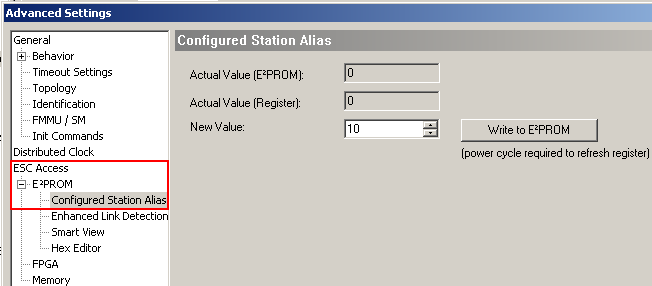 Abb.209: SSA setzen unter TwinCAT 2.11
Abb.209: SSA setzen unter TwinCAT 2.11Kompatible Beckhoff-Geräte
Im Allgemeinen kann jedem EtherCAT-Slave eine Hot-Connect-Adresse zugeordnet werden, unabhängig davon ob es eine IO-Klemme, ein Antrieb oder eine Baugruppe aus Koppler und Klemmen ist.
| Hot-Connect-Fähigkeit Prüfen Sie, ob der von Ihnen verwendete EtherCAT-Slave Hot-Connect-fähig ist. Beckhoff-Slaves unterstützen die Funktionen aktuell wie folgt (Stand 06.2023): |
Version | SecondSlaveAdress | InputWord | Explicit Device Identification |
|---|---|---|---|
EK1100 | ab HW18 | - | - |
EK1101, EK1501, EK1101-0080 | alle | alle | - |
BK1120 | ab HW09 | - | - |
EL-Klemmen | i. allg. ja für die meisten Bauserien ab einer XML-Version xxxx-xxxx-0016 | - | - |
EP-Boxen | i. allg. ja für die meisten Bauserien ab einer XML-Version xxxx-xxxx-0016 | - | - |
AX2xxx | - | - | - |
AX5xxx | alle | siehe Dokumentation | siehe Dokumentation |