Konfiguration für EtherCAT
Die EP9521-0020 erfüllt die folgenden Voraussetzungen für den Einsatz als EtherCAT-Medienkonverter:
- Konstante geringe Durchlaufverzögerung der Frames, unabhängig von der Framelänge
- Schnelle Link-Detektion bei Aufbau und Abbau der Verbindung
- Kennung als eigenes EtherCAT-Gerät mit Diagnose
Stellen Sie vor der Inbetriebnahme die gewünschte Laufrichtung der EtherCAT-Frames über den Drehschalter S1 ein:
Drehschalter S1 | Schalterposition | Laufrichtung der EtherCAT‑Frames | |
|---|---|---|---|
| 0 | X2 ► X1 ► X3 |
|
| 2 | X1 ► X3 ► X2 |
|
| 5 | X1 ► X2 ► X3 |
|






Beispiel
In der folgenden Abbildung werden die EP9521-0020 wie folgt betrieben:
- Die linke EP9521-0020 als Medienkonverter Kupfer auf LWL (S1 = 5)
- Die rechte EP9521-0020 als Medienkonverter LWL auf Kupfer (S1 = 0)
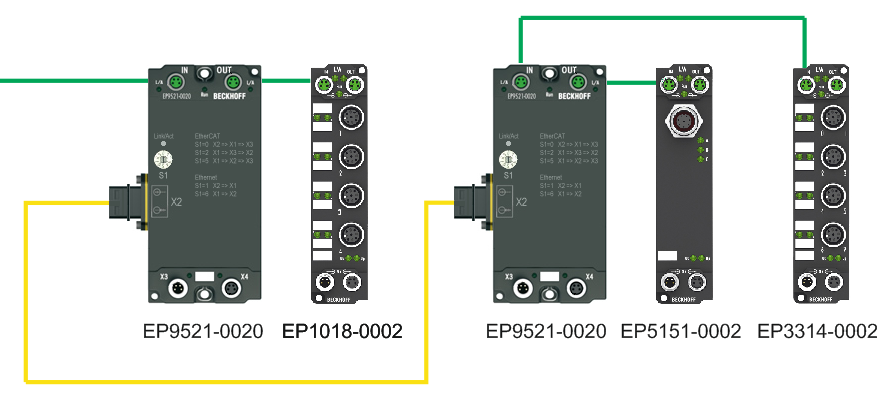
Die Laufrichtung des EtherCAT Frames ist also wie folgt:
MASTER ► X1 (EP9521_1) ► X2(EP9521_1) ► X2(EP9521_2) ► X1(EP3314) ► X3(EP5151) ► X3(EP9521_1) ► X2(EP9521_1) ► X3(EP1018) ► MASTER
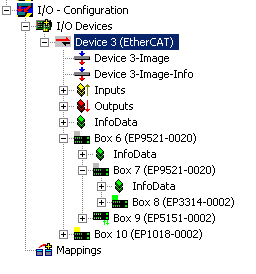
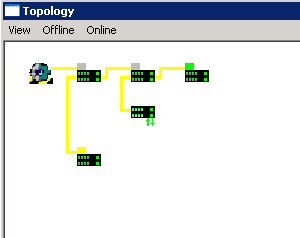
In TwinCAT wird die Netzwerkstruktur wie folgt dargestellt:
- Solution Explorer:
- Topologie-Ansicht:
Wird die gegensätzliche Drehrichtung eingestellt, ist das Folgeverhalten vom EtherCAT-Master abhängig. Unter Umständen wird die gescannte EP9521-0020 dann an einer anderen Position in die Topologie eingebaut oder er verursacht eine INIT_VPRS-Fehlermeldung des EtherCAT-Masters.